Статья:




Автоматическая парковка крупногабаритного транспортного средства
Конференция: XIII Студенческая международная научно-практическая конференция «Молодежный научный форум»
Секция: Технические науки
Выходные данные
Сотников А.А. Автоматическая парковка крупногабаритного транспортного средства // Молодежный научный форум: электр. сб. ст. по мат. XIII междунар. студ. науч.-практ. конф. № 12(13). URL: https://nauchforum.ru/archive/MNF_interdisciplinarity/12(13).pdf (дата обращения: 28.07.2026)
Лауреаты определены. Конференция завершена
Эта статья набрала 3 голоса
Мне нравится3
Дипломы
лауреатов
лауреатов
Сертификаты
участников
участников
Дипломы
лауреатов
лауреатов
Сертификаты
участников
участников

XIII Студенческая международная научно-практическая конференция «Молодежный научный форум»
Автоматическая парковка крупногабаритного транспортного средства
Сотников Антон Александрович
студент, РТУ МИРЭА, РФ, г. Москва
Слепынина Евгения Алексеевна
научный руководитель, ассистент, РТУ МИРЭА, РФ, г. Москва
В настоящее время стремительное развитие получает идея беспилотного транспортного средства (ТС). Задача автономности автомобилей решается по двум направлениям: комплексная автоматизация ТС и автоматизация отдельных режимов движения, основным из которых является парковка. Парковочные автопилоты уже давно встраиваются в конфигурации легковых автомобилей в то время, как на крупногабаритных ТС такие системы отсутствуют.
Объектом созданной системы автоматической парковки является бронетранспортёр БТР-80. В его систему очувствления входят: 5 ультразвуковых дальномеров (по 2 датчика по сторонам ТС, 1 датчик на задней части платформы), а также система стереозрения, состоящая из двух камер.
Для решения задачи автоматической парковки применялась линейная стратегия (ЛС) поведения ТС по причине минимальной трудоёмкости реализации и высокой надёжности функционирования. ЛС подразумевает три основных этапа выполнения беспилотной парковки:
· Движение платформы к предполагаемому местонахождению парковочной зоны;
· Поиск парковочного места;
· Выполнение парковки.
Перемещение платформы на каждом этапе автоматической парковки обеспечивается комбинированным соединением экспертной и нечёткой логической системы (НЛС) с использованием информации сенсорных датчиков, сформированной в виде локальной карты местности. Экспертная система выполняет задачу изменения скорости и направления движения транспортного средства в зависимости от расстояния до цели и пеленга.
Базу знаний НЛС составляют функции принадлежности и продукционные правила, определяющие поворот направляющих колёс в зависимости от пеленга цели и расположения препятствий относительно транспортного средства (Рис. 1).
Геометрическая форма выходных функций принадлежности обуславливает больший приоритет объезда препятствий, чем для движения к целевой точке [1, с. 180].
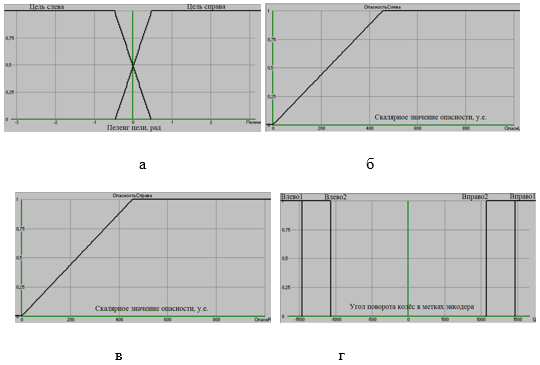
Рисунок 1. Лингвистические переменные для решения задачи целевого движения: а – входная переменная «Пеленг», б – входная переменная «ОпасностьL», в – входная переменная «ОпасностьR», г – выходная переменная «Угол поворота»
Продукционные правила нечёткой системы имеют вид:
ЕСЛИ «Пеленг есть ЦельСлева» ТО «УголПоворота есть Влево1»
ЕСЛИ «Пеленг есть ЦельСправа» ТО «УголПоворота есть Вправо1»
ЕСЛИ «ОпасностьL есть ОпасностьСлева» ТО «УголПоворота есть Вправо2»
ЕСЛИ «ОпасностьR есть ОпасностьСправа» ТО «УголПоворота есть Влево2»
Движение платформы к планируемому местоположению парковочной зоны осуществляется засчёт передачи координат целевой точки на тактический уровень (ТУ) объекта управления (ОУ) с параметром, подтверждающим действие целеуказания. При получении параметра подтверждения ТУ формирует программу управления для исполнительного уровня, а по достижении парковочной зоны передаёт сигнал о завершении операции на стратегический уровень (СУ) ОУ [2, с. 21].
Поиск парковочных мест производится по траектории в виде раскручивающейся спирали, задаваемой с помощью последовательных целеуказаний, аналогично движению к парковочной зоне. Распознавание парковочных полос осуществляется с помощью видеокамеры на передней части платформы. При нахождении парковочной полосы ТУ ОУ фиксирует координаты текущего местоположения, а затем производит расчёт уравнения прямой, на которой лежит полоса, и перпендикуляра к ней в системе координат (СК) на базовой плоскости, являющейся частным случаем геоцентрической СК. Нормаль является новой траекторией движения ТС, необходимой для поиска второй парковочной полосы, во избежание ошибочного определения парковочного места. Предполагается, что если при движении по новой траектории вторая парковочная полоса не была найдена и длина пройденного пути превышает ширину парковочного места, то найденная первая полоса является крайней. В ином случае ТУ ОУ формирует сигнал о нахождении парковочного места и своё выполнение начинает следующий алгоритм.
Выполнение парковки производится задним ходом из положения, соответствующего точке, находящейся на прямой между парковочными полосами на удалении от места нахождения первой полосы, необходимом для беспрепятственного маневрирования ТС. Выбор из двух возможных точек осуществляется в зависимости от наличия препятствий по сторонам платформы. При достижении целевой точки СУ ОУ формирует команду выполнения беспилотной парковки, представляющую собой целеуказание на точку между парковочными полосами позади ТС (Рис. 2).

Рисунок 2. Этапы выполнения парковки
Движение задним ходом корректируется с использованием двух видеокамер на задней части ТС, задача которых заключается в определении угла наклона парковочных полос относительно платформы. Корректировка состоит в минимизации угла между парковочными полосами и направлением пеленга (Рис.3).
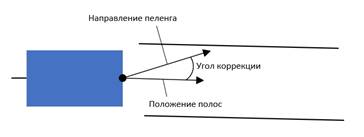
Рисунок 3. Определение угла корректировки
Возможно несколько вариантов расчёта корректировочного угла  :
:
 , (1)
, (1)
где:  – угол рассогласования,
– угол рассогласования,  – угол поворота полос относительно ТС.
– угол поворота полос относительно ТС.
Задача минимизации угла корректировки осуществляется засчёт пополнения базы знаний НЛС (Рис. 4).

Рисунок 4. Лингвистические переменные для решения задачи коррекции парковки: а – входная переменная «Угол коррекции», б - выходная переменная «Угол поворота»
Продукционные правила нечёткой системы имеют вид:
ЕСЛИ «УголКоррекции есть Коррекция левее» ТО «УголПоворота есть Влево3»
ЕСЛИ «УголКоррекции есть Коррекция правее» ТО «УголПоворота есть Вправо3»
В момент обнаружения парковочных полос обеими видеокамерами производится расчёт пройденного расстояния, при превышении длины ТС которым осуществляется остановка платформы, а задача беспилотной парковки считается выполненной.
Результаты моделирования процесса автоматической парковки позволяют говорить о работоспособности исполненных алгоритмов (Рис. 5).

Рисунок 5. Траектории движения ТС при выполнение беспилотной парковки
Список литературы:
1. Евстигнеев Д.В. Системы управления интеллектуальных мобильных роботов в среде Dyn-Soft RobSim 5: учебное пособие / Евстигнеев Д.В. – М., 2014. – 181 с.
2. Макаров И.М. Интеллектуальные системы автоматического управления / И.М. Макаров, В.М. Лохин – М.: ФИЗМАЛИТ, 2001 – 576 с.
