Статья:




АВТОНОМНАЯ СИСТЕМА РЕГИСТРАЦИИ НЕРЕГЛАМЕНТИРОВАННЫХ ТРАНСПОРТНЫХ ПЕРЕГРУЗОК
Конференция: CLXXIX Студенческая международная научно-практическая конференция «Молодежный научный форум»
Секция: Технические науки
Выходные данные
Шишпор В.В. АВТОНОМНАЯ СИСТЕМА РЕГИСТРАЦИИ НЕРЕГЛАМЕНТИРОВАННЫХ ТРАНСПОРТНЫХ ПЕРЕГРУЗОК // Молодежный научный форум: электр. сб. ст. по мат. CLXXIX междунар. студ. науч.-практ. конф. № 28(179). URL: https://nauchforum.ru/archive/MNF_interdisciplinarity/28(179).pdf (дата обращения: 28.07.2026)
Лауреаты определены. Конференция завершена
Эта статья набрала 0 голосов
Мне нравится0
Дипломы
лауреатов
лауреатов
Сертификаты
участников
участников
Дипломы
лауреатов
лауреатов
Сертификаты
участников
участников

CLXXIX Студенческая международная научно-практическая конференция «Молодежный научный форум»
АВТОНОМНАЯ СИСТЕМА РЕГИСТРАЦИИ НЕРЕГЛАМЕНТИРОВАННЫХ ТРАНСПОРТНЫХ ПЕРЕГРУЗОК
Шишпор Владислав Владимирович
студент, Нижегородский государственный технический университет им. Р.Е. Алексеева, Арзамасский политехнический институт, РФ, г. Арзамас
Шаров Владимир Александрович
научный руководитель, Нижегородский государственный технический университет им. Р.Е. Алексеева, Арзамасский политехнический институт,
РФ, г. Арзамас
Аннотация. В статье рассматриваются результаты работы по созданию автономной системы регистрации транспортных перегрузок (АСРП1). Приведён алгоритм работы АСРП1, представлены этапы работы данной системы.
Ключевые слова: регистратор, виброударные перегрузки, преобразователь, механические перегрузки, стыковка, термокомпенсация.
В последние годы, в связи с увеличением железнодорожных перевозок в интересах транспортировки опасных грузов, таких, например, как отработанное топливо (ОТ) атомных электростанций, весьма актуальным стал вопрос создания системы автоматизированного контроля транспортных перегрузок, реализуемых на перевозимых грузах - ОТ.
На рисунке 1 перечислены основные задачи, решаемые с помощью АСРП1
АСРП1 предназначена для контроля соблюдения перевозчиком эксплуатационно-допустимых виброударных режимов транспортирования отработанного топлива АЭС, что достигается посредством:
- измерения и регистрации факта достижения и превышения транспортными перегрузками порогового уровня 3 (4) g по каждой из трех осей ортогональной системы координат;
- измерения, регистрации и запоминания до трех зависимостей перегрузок от времени в диапазоне от порогового до 10 g на временном интервале 0,18 с;
- экспресс - оценки состояния контролируемого объекта (сигнализации о факте превышения (не превышения) транспортными перегрузками пороговых значений). Устройство должно обладать стойкостью и прочностью к климатическим условиям, позволяющие использовать их круглый год и перевозить любым видом транспорта. Конструкция устройства должна обеспечивать стойкость к воздействию электромагнитных полей.
Масса РП должна быть не более 0,8 кг.
Исполнение РП невосстанавливаемое, неремонтируемое.
Конструкция пульта опроса и регистратора должна обеспечивать периодическую замену источников тока.
Связь РП с пультом опроса должна обеспечиваться с помощью соединительных жгутов.
Регистратор виброударных перегрузок АРП1 в диапазоне частот от 10 до 500 Гц должен:
- позволять устанавливать значение порога его срабатывания в диапазоне от 3 g до 10 g с шагом ~ 0,5 g;
- обеспечивать от одного до трех циклов регистрации виброударных перегрузок в диапазоне от 3 g до 95 g;
- запоминать зарегистрированное значение виброударных перегрузок на срок не менее 15 суток;
- обеспечивать контроль факта регистрации виброударных перегрузок, превышающих пороговые значения (3 или 4 g)
Технические требования к регистратору перегрузок
На рисунке представлена конструкция регистратора перегрузок АРП1.
Рисунок 1. Регистратор перегрузок АРП1
1-пьезоэлектрический преобразователь;
2-электронный блок;
3 - источник электрической энергии;
4 - защитный колпачок;
5- канал для пломбирования;
6 - тумблер включения питания;
7 - кнопка экспресс - опроса;
8-светоиндикатор факта превышения (не превышения) допустимого порога перегрузки;
9-защитный чехол;
Р–электрический соединитель для связи с пультом опроса;
А – заглушка.
На рисунке приведена структурная схема АРП1, поясняющая принцип его действия.

Рисунок 2 - Структурная схема АРП1
Dx, Dy, Dz - пьезоэлектрические датчики по соответствующей координате;
CY1 ,CY2,CY3 - согласующие устройства (усилитель, цепи согласования входов-выходов);
АЦП - 12 разрядный четырехканальный аналого-цифровой преобразовательс мультиплексором;
МК - микроконтроллер;
СОЗУ - статическое оперативное запоминающее устройство;
ЭППЗУ - электрическое перепрограммируемое запоминающее устройство;
ИП - источник постоянного тока (литиевый элемент ЕR6S).
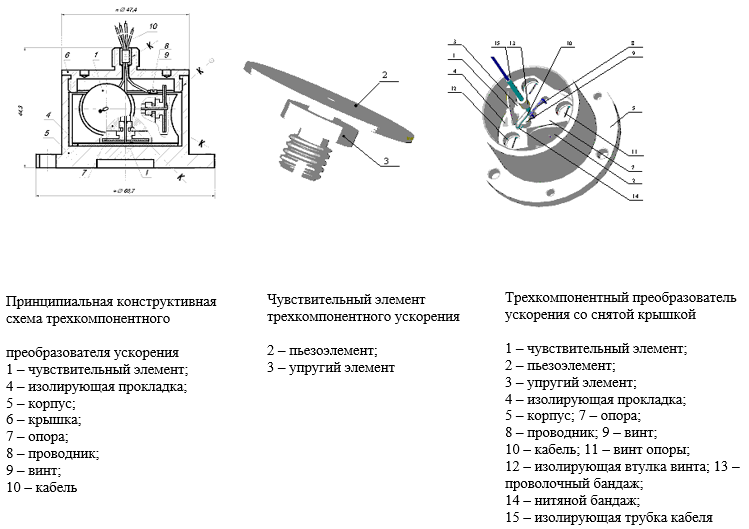
Первичный измерительный преобразователь ускорения представляет собой трехкомпонентный пьезоэлектрический акселерометр, установленный на днище корпуса регистратора через дисковый изолятор с помощью трех винтов. Его конструкция и кинематическая схема представлены на 6 рисунке.
Корректирующие входные цепи аналоговой части электронного блока обеспечивают индивидуальную подстройку чувствительности первичного преобразователя ускорений посредством введения добавочной электрической емкости, параллельной входу предварительного усилителя.
Дополнительно, с целью снижения суммарной погрешности измерения, осуществляется:
- термокомпенсация выходного сигнала регистратора по фактической зависимости коэффициента преобразования трехкомпонентного пьезоакселерометра от температуры (в виде таблицы данных, записанной в ПЗУ регистратора).
Крепление АРП1 к объекту испытаний осуществляется с помощью 3-х винтов или болтов М5, проходящих через соответствующие отверстия в основании АРП1. Для резьбового крепления АРП1 в объекте испытаний должно быть выполнено 3 отверстия М5-7Н глубиной не менее 6 мм. Момент затяжки винтов (болтов) должен составлять 2,5-3,5 Нм, при этом необходима контровка резьбового соединения с помощью пружинных шайб или эпоксидного клея.
Представлены этапы работы АРП1.
1 - нахождение не на "дежурстве";
2 - связь с пультом опроса, получение времени постановки на "дежурство";
3 - отсчёт заданного интервала времени и установка на "дежурство";
4 - нахождение в режиме "дежурства";
5- связь с пультом опроса, передача состояния и зарегистрированной информации.
На этапе нахождения не в режиме "дежурства", микроконтроллер (МК) ведет отсчёт интервалов времени длительностью 2 с, по окончании которого проверяет подстыковку к внешнему разъему связи пульта опроса. В случае отсутствия стыковки MK начинает очередной отсчёт интервала времени длительностью 2 с.
При наличии стыковки MK производит связь со специальным пультом опроса (ПО), на который передаёт номер АРП1, его состояние и значение уровня напряжения питания. При наличии в пульте опроса информации для установки АРП1 с принятым номером, с пульта передаётся время установки на "дежурство" после чего связь прекращается.
Алгоритм работы АРП1 выглядит следующим образом.
Механические перегрузки в месте установки АРП1 воспринимаются высокочувствительным пьезоэлектрическим трехкомпонентным датчиком, каждая компонента которого (Dx, Dy Dz), подвергаясь под действием инерционных сил деформации изгиба, генерирует электрический заряд, пропорциональный мгновенному значению ускорения действующего в любом направлении по соответствующей оси ортогональной системы координат – x, y, z. Напряжения с выходов датчиков подаются на согласующие устройства CY1, CY2, CY3, которые согласовывают высокоомные сопротивления цепей датчиков с низкоомными сопротивлениями последующих электронных устройств.
В аналого-цифровом преобразователе АЦП сигналы с выходов согласующих устройств преобразуются в цифровой код, импульсы которого поступают в микроконтроллер МК, где происходит их обработка. В случае, если уровень сигнала (скорректированного с учетом температуры окружающей среды), поступающего с любого из датчиков, достигает значения, соответствующего перегрузке А0= 3 (4g) в МК ведется обработка по каждому из датчиков » 450 дискретных значений ускорений и последующей перезаписи этих данных в электрическое перепрограммируемое устройство ЭППЗУ. За время работы АРП1 в ЭППЗУ может быть записана информация о трех фактах, при которых механические перегрузки в местах установки регистратора превысили по любой из осей пороговый уровень контролируемых перегрузок а также регистрация текущего значения времени и значения температуры в месте расположения регистратора. Эти данные также заносятся в ЭППЗУ. Питание АРП1 осуществляется от встроенного в прибор литиевого элемента питания - ТХЛ-01(ER6S), обеспечивающего непрерывную работу прибора в течение не менее 2000 часов.
На 5 этапе, как уже ранее отмечалось, осуществляется диагностика зарегистрированного состояния и съем информации с помощью пульта опроса.
Съем информации с регистратора может производиться в двух режимах: оперативном (получение информации о факте превышения по любому направлению ортогональной системы координат действующей перегрузкой порогового значения) и полномасштабном режимах (получение всей зарегистрированной информации: зависимости перегрузки во времени, значения моментов времени начала регистрации, значений температуры на момент начала регистрации).
В случае, если значение воздействующей перегрузки превысило допустимый порог, возможен съем полного объема информации с АРП1. Для чего выполняется ряд подготовительных операций по самоконтролю пульта опроса и его подключению к опрашиваемому АРП1. В процессе опроса на жидкокристаллическом экране пульта опроса индицируются результаты выполнения соответствующих операций таких, например как “АРПN Норма”, “Батарея норма”и др.
По завершению приема зарегистрированных данных и их анализа на ЖКИ для каждой регистрации высвечиваются результаты: в первой строке ЖКИ “Рег N1…3”, а во второй строке указывается максимальное по модулю значение зарегистрированной перегрузки в “g” с указанием соответствующей оси координат (X, Y или Z) в виде (Х=N[g], или Y= N[g], или Z= N[g]) ;
После съема информации осуществляется либо перевод АРП1 в дежурное состояние, либо зарегистрированная информация сохраняется в АРП1 до принятия решения об ее уничтожении (алгоритм работы по этому пункту в дальнейшем будет отражен в соответствующих руководящих документах).
Принцип действия АСРП1 может быль использован и при создании системы регистрации параметров (перегрузка, время) интенсивных динамических нагружений сложных конструкций, в частности измерительной системы для определения зависимостей перегрузок во времени при испытаниях конструкций на падения. Основным отличием подобной измерительной системы от АСРП1 является разделение АРП1 на два узла: первичный преобразователь (ПП) и электронный блок обработки сигналов с ПП. Учитывая наличие интенсивных ударных нагрузок (перегрузки - тысячи g c длительностью единицы миллисекунд) электронный блок выполняется в ударозащищенном варианте. Зарегистрированная информация заносится в энергонезависимую память и по интерфейсу, например RS-232C, переносится в ПЭВМ.
Список литературы:
1. Алексенко А.Г. и др. Применение аналоговых прецизионных аналоговых схем. 1985.
2. Шило В.Л. Линейные интегральные схемы. 1974г.
3. ОУ МАХ 418, РТМ фирмы – производителя.
