Статья:




ИССЛЕДОВАНИЕ СУЩЕСТВУЮЩИХ ДЕМОНТАЖНЫХ РОБОТОВ ДЛЯ ДАЛЬНЕЙШЕЙ РЕАЛИЗАЦИИ СИСТЕМЫ ТЕХНИЧЕСКОГО ЗРЕНИЯ
Конференция: CCXLI Студенческая международная научно-практическая конференция «Молодежный научный форум»
Секция: Технические науки
Выходные данные
Калинин А.М. ИССЛЕДОВАНИЕ СУЩЕСТВУЮЩИХ ДЕМОНТАЖНЫХ РОБОТОВ ДЛЯ ДАЛЬНЕЙШЕЙ РЕАЛИЗАЦИИ СИСТЕМЫ ТЕХНИЧЕСКОГО ЗРЕНИЯ // Молодежный научный форум: электр. сб. ст. по мат. CCXLI междунар. студ. науч.-практ. конф. № 9(241). URL: https://nauchforum.ru/archive/MNF_interdisciplinarity/9(241).pdf (дата обращения: 28.07.2026)
Лауреаты определены. Конференция завершена
Эта статья набрала 0 голосов
Мне нравится0
Дипломы
лауреатов
лауреатов
Сертификаты
участников
участников
Дипломы
лауреатов
лауреатов
Сертификаты
участников
участников

CCXLI Студенческая международная научно-практическая конференция «Молодежный научный форум»
ИССЛЕДОВАНИЕ СУЩЕСТВУЮЩИХ ДЕМОНТАЖНЫХ РОБОТОВ ДЛЯ ДАЛЬНЕЙШЕЙ РЕАЛИЗАЦИИ СИСТЕМЫ ТЕХНИЧЕСКОГО ЗРЕНИЯ
Калинин Андрей Михайлович
студент, Московский Государственный технический университет им Н.Э. Баумана – МГТУ им Н.Э. Баумана, РФ, г. Москва
RESEARCH ON EXISTING DEMOLITION ROBOTS FOR FURTHER VISION SYSTEM IMPLEMENTATION
Andrei Kalinin
Student, Bauman Moscow State Technical University - BMSTU, Russia, Moscow
Аннотация. В данной статье представлен анализ существующих демонтажных роботов. Были рассмотрены модели самых популярных компаний производителей демонтажных роботов, на основе которого был выбран демонтажных робот для внедрения в него системы технического зрения для полуавтономной работы. Основываясь на проведенном исследовании, был предложена функциональная схема демонтажного робота. Полученные результаты имеют значение для дальнейшего исследования и реализации системы технического зрения демонтажного робота.
Abstract. This paper presents an analysis of existing demolition robots. The models of the most popular companies of dismantling robot manufacturers were considered, on the basis of which the dismantling robot was selected to implement a vision system for semi-autonomous operation. Based on this study, a functional scheme of the dismantling robot was proposed. The obtained results are important for further research and realization of the vision system of the dismantling robot.
Ключевые слова: демонтажный робот, мобильный робот, система технического зрения, компьютерное зрения, робот Brokk.
Keywords: demolition robot, mobile robot, vision system, computer vision, Brokk robot.
Введение. Демонтажные роботы становятся все более и более популярными в сфере строительства, заменяя более старое поколение - машины для сноса зданий (экскаваторы, демоляторы). Это происходит потому что, при использовании любой тяжелой машины расходуется большое количество электроэнергии или воды, которая снижает уровень пыли на площадке. А новые роботы, имеют возможность не только проводить работы практически без пыли, а еще и легко расчленять строительные отходы прямо на месте. Это позволяет экономить на транспортировке отходов к месту их переработки, а затем назад на площадку для повторного использования.
Демонтажные роботы используются в строительной отрасли для сноса зданий в конце их жизненного цикла. Эти мобильные роботы являются относительно новой формой профессиональных сервисных роботов и используют различные инструменты на конце манипулятора, такие как бетонные дробилки, буры, ковши или многофункциональные захваты для разрушения строительных материалов. Большинство таких роботов похожи на небольшие экскаваторы, только без кабины, и предназначены для того, чтобы наносить мощный удар в небольшом пространстве, проходящем через дверные и лестничные проемы. В настоящее время демонтажные роботы занимают 90% всего рынка строительных роботов. Это одни из первых коммерчески жизнеспособных сервисных роботов, которые начали применяться в исторически трудоемкой отрасли. [1]
В ходе данной научной статьи будет более подробно рассмотрены и выбран демонтажный робот для дальнейшего внедрения системы технического зрения, а также разработана функциональная схема данного робота.
Обзор роботов для демонтажа строительных конструкций. Демонтаж конструкций – процесс, который включает в себя изучение сносимого объекта, согласование условий работы и разработка технологии. Главная задача демонтажа конструкций – убрать непригодные для использования конструкции и узлы.
Демонтажные роботы начали разрабатываться во второй половине двадцатого века, и со временем они становились все более и более популярны, так как в настоящее время к общестроительным и специальным работам, особенно в условиях плотной городской застройки, предъявляются все более жесткие требования как в вопросах экологии и охраны труда, так и в плане минимизации сроков и повышения качества. Эти же требования актуальны и для демонтажных работ. В виду сказанного, можно сделать вывод, что рост популярности демонтажных роботов со временем только растет. В настоящее время роботы для сноса занимают 90% строительного рынка робототехники. Популярность этих машин постоянно растет. И по мере расширения сфер их применения они могут занять еще большую часть рынка. Роботы для демонтажа по своей сути это разновидность тяжелой техники. Их основная задача - сносить здания, когда приходит время для нового строительства. Однако эти роботы помогают и в других целях.
Роботы-демонтажники широко используются в строительной отрасли для сноса и эвакуации. Они играют решающую роль в перемещении тяжелых материалов с первого этажа на более высокие этажи.
Рассмотрим достоинства и недостатки роботов для демонтажа конструкций. [5]
К основным достоинствам робототехнических систем для демонтажа конструкций:
- Они обладают относительно большой мощностью. Будучи машинами большой мощности, роботы-демонтажники имеют множество дополнительных преимуществ. Несмотря на то, что размеры робота намного меньше, чем у его аналогов, его мощность намного больше. Эти роботы способны продолжать работу без перерывов и пауз. Многие модели демонтажных роботов значительно превосходить экскаваторы, которые в несколько раз больше.
- Дистанционное управление. Большая часть роботов для демонтажа конструкций обладает возможностью дистанционного управления, что обеспечивает дополнительный контроль над функциями робота. Помимо большей эффективности, они более безопасны, чем роботы с ручным управлением. Поскольку операторы могут управлять ими снаружи машины, что в свою очередь, понижает риски, однако не убирает их. Они защищены от вредных элементов и непредвиденных обрушений.
- Трехшарнирная конструкция. Большинство роботов-демонтажников представляют из себя трех-шарнирную конструкцию. На строительных площадках некоторые участки компактны и плотны, что затрудняет доступ к ним. Трехшарнирная система расширяет радиус действия робота. Эти роботы способны получить доступ ко всему в радиусе 180 градусов. Кроме того, такая конструкция обеспечивает большую точность и аккуратность для более точной работы.
- Устойчивость к нагреву. Демонтаж зданий требует большого количества энергии. При этом выделяется большое количество тепла. Поскольку строительная техника вырабатывает эту энергию, цилиндры внутри нагреваются. Это опасно для оператора и двигателя. Многие роботы для сноса зданий являются термостойкими. Это безопаснее для оператора, окружающей среды и самой структуры робота. Они обеспечивают безопасность каждого компонента и снижают вероятность перегрева. Это также продлевает срок службы робота-разрушителя.
- Возможность использовать специальные насадки. Большинство демонтажных роботов обладают способностью использовать большое количество насадок, предназначенных для разных целей в демонтаже, что сильно увеличивает цели, которые могут выполнять роботы.
К основным недостаткам демонтажных роботов относят:
- Обучение персонала. Только опытные и обученные профессионалы могут управлять демонтажным роботом. Использование роботов необученным человеком опасно, как для человека, так и для робототехнической системы. Дополнительное обучение требует инвестиций. Но оно необходимо для безопасного и эффективного использования робота-демонтажника. При этом обучение стоит денег и времени. Компаниям, планирующим использовать рассматриваемый тип роботов, необходимо предусмотреть дополнительные расходы.
- Возможные ошибки. В отличие от людей, машины не способны принимать когнитивные решения. Их движения зависят от компьютерных алгоритмов. Роботы могут выполнять только ту работу, которая предписана кодом. Если возникает непредвиденная ситуация, они не способны реагировать и адаптироваться, как это сделал бы человек. Важно осознавать, что эти машины не лишены риска.
- Крупные денежные инвестиции. Роботы для демонтажа конструкций стоят дорого. Не каждая компания может понести первоначальные инвестиционные затраты. В среднем их рыночная стоимость составляет около 200 тысяч долларов, не учитывая стоимость обучения персонала. Для рентабельной окупаемости инвестиций необходимо наличие большого количества проектов. Однако, стоит учитывать, что существуют строительные компании, которые предлагают аренду робототехнической системы за гораздо меньшую сумму. Такой вариант стоит рассматривать, если необходимость использования робота ограничена.
Далее рассмотрены некоторые варианты роботов для демонтажа конструкций.

Рисунок. 1 Робот The Brokk 250
Демонтажный робот The Brokk 250. Демонтажный робот Brokk 250 (рисунок 1) был разработан компанией Brokk в 2021 году. [6] Brokk 250 – одна из самых универсальных моделей в линейке роботов Brokk. Шести с половиной вылет стрелы открывает новые возможности применения машины. Робот оснащен возможность вращения манипулятора на 360 градусов, что обеспечивают эту машину непревзойденной производительностью при выполнении сложных, тяжелых задач по демонтажу и ремонту на предприятиях и в жилых домах. Также, стоит отметить, что робот работает на электродвигателе от компании ABB. Оснащенный уникальным гидромолотом с тепловой и ударной защитой, Brokk 250 идеально подходит для работ в горячих ковшах, конвертерах, желобах и печах. Кроме того, эта модель характеризуется улучшенной маневренностью, и точность ее манипуляций выведена на совершенно новый уровень.
Основные характеристики робота представлены в таблице 1.
Таблица 1.
Основные технические характеристики The Brokk 250
|
Скорость вращения башни, сек/360о |
16 |
|
Скорость движения, макс. км/ч |
2,8 |
|
Преодолеваемый уклон, макс, o |
40 |
|
Мощность электродвигателя, кВТ |
22 |
|
Горизонтальный вылет стрелы, макс, м |
6,5 |
|
Вертикальный вылет стрелы, макс, м |
6,5 |
|
Масса конструкции, кг |
До 3600 |
|
Масса навесного оборудования, кг |
До 350 |
В конструкции рассматриваемого демонтажного робота реализованы гусеничные движители, чтобы облегчить перемещение робота, а также обеспечить возможность подъема по лестнице (при условии, что угол лестницы не превышает 30о. В добавок, к этому, у робота присутствуют 4 фиксатора (аутригера), которыми он фиксирует свое положение перед началом работы, чтобы повысить устойчивость своей позиции.
Также, важно отметить, что робот обладает возможностью менять навесное оборудование, которое необходимо докупать отдельно. Среди данного оборудования, можно отличить:
- Гидромолоты
- Ковши
- Фрезы
- Дробилки для бетона
- Ножницы по металлу
- Грейферные ковши
- Пилы
Brokk 250 оснащен системой SmartPower, улучшающая рабочие показатели силового агрегата, обеспечивает повышение выходной мощности Brokk 250 на 25%, относительно его предшественников.
В добавок, стоит отметить, что данный робот управляется в первую очередь с пульта управления специально обученным оператором, причем робот будет получать сигнал на расстоянии вплоть до 200 метров. Однако, стоит отметить, что в виду точности, с которой должен работать данный робот, а также неудобства экрана пульта управления, оператор зачастую стоит в непосредственной близости робота, чтобы лично отслеживать действия робота. При таком управлении, повышается опасность для оператора, что не следует допускать.
Также компания Brokk предоставляет возможность дополнительно усилить конструкцию робота, при необходимости работы в тяжелых условиях, такие как:
- Защита для цилиндров
- Стальные гусеницы
- Термостойкие шланги
Таким образом, можно сделать вывод, что данный демонтажный робот идеально подходит для ситуаций, при которых необходимо максимизировать производительность. Он предоставляет обширный выбор навесного оборудования, а также модификаций корпуса, манипулятора, движителей и аутригеров, что позволяет выбрать ту конфигурацию, которая подходит для конкретной ситуации. Однако, большим недостатком данной робототехнической системы является его размеры и масса, что ограничивает возможности использования данной конструкции при
Демонтажный робот Husqvarna DXR 315. Робот Husqvarna DXR 315 (рисунок 2) был разработан шведской компанией Husqvarna. [7] В отличие от демонтажного робота Brokk 900, DXR 315 обладает массов в 2020 кг, что почти в 5 раз легче, чем рассмотренный ранее робот. DXR 315 — это мощный демонтажный робот с дистанционным управлением и телескопической стрелой, позволяющей значительно расширить рабочую зону. Несмотря на относительно малый вес для демонтажного робота и компактный размер, робот обладает мощностью 27 кВт, что делает его идеальным для эффективного разрушения в тяжелых условиях, а также более универсальным, в виду требований к массе робота и к его размерам. Индивидуально управляемые аутригеры расставляются достаточно далеко, что в сочетании с большой площадью основания обеспечивает превосходную устойчивость, которая позволяет выдерживать высокую нагрузку. Поставляется с удобным пультом дистанционного управления для безопасной работы и простоты маневрирования.

Рисунок. 2 Демонтажный робот Husqvarna DXR 315
DXR 315 — это универсальная машина, которую можно использовать как для демонтажа, так и для обрабатывающей промышленности. Может оснащаться различными инструментами, такими как молоты, компактные и универсальные дробилки или ножницы по металлу. Для самых тяжелых условий эксплуатации производитель рекомендует дополнительные функциональные опции. Для DXR 315 доступны комплекты защиты гидроэлементов и цилиндров, а также комплекты охлаждения и усиленной теплозащиты. Эти дополнения позволяют работать с машиной при высоких температурах окружающей среды.
Основные характеристики данного демонтажного робота представлены в таблице 2.
Таблица 2.
Основные характеристики Husqvarna DXR 315
|
Скорость вращения башни, макс (настраиваемая), сек/360о |
9.5 |
|
Скорость движения, макс. км/ч |
2,8 |
|
Преодолеваемый уклон, макс, o |
35 |
|
Мощность электродвигателя, кВТ |
27 |
|
Горизонтальный вылет стрелы, макс, м |
5.2 |
|
Вертикальный вылет стрелы, макс, м |
5.5 |
|
Масса конструкции, кг |
До 2020 |
|
Рекомендованная масса навесного оборудования, кг |
До 300 |
Таким образом, можно сделать вывод, что демонтажный робот, разработанный компанией Husqvarna разрабатывался с целью промышленного демонтажа в ограниченной территории проведения работ, в случаях, в которых необходимо учитывать размеры и вес робота. Также, стоит отметить, что робот обладает большим количеством навесного оборудования, что также повышает возможности применения робота в зависимости от поставленных задач. Однако, как и у демонтажного робота от компании Brokk, у данного робота присутствует существенный недостаток. Невозможность автономный работы робота, а также неудобный пульт управления сильно повышает опасность, которой подвергается оператор.
Демонтажный робот Avant 185. Демонтажный робот Avant 185 (рисунок 3) был разработан финской компанией Avant. [8] Строительный робот с гидромолотом обладает отличной устойчивостью, за счет низкого центра тяжести, хирургической точностью и повышенной прочностью комплектующих. Особенностью данного робота является тот факт, что он, в ограниченных пространствах, за счет своих габаритов и конструкции, способен справиться с такой работой, которую не выполнить на других аналогах. Данная модель была разработана в первую очередь для демонтажа отдельных частей многоэтажного здания, оставляя при этом большую часть здания работоспособной. Управление роботом возможно по средствам пульта управления через радио канал или кабель.

Рисунок. 3 Демонтажный робот Avant 185
Как и в случае с другими рассмотренными роботами, данная модель оснащена гусеничными движителями для облегчения перемещения и возможности подниматься по лестнице. В добавок к этому, у демонтажного робота Avant 185, как и у других рассмотренных, имеется 4 аутригера для повышения устойчивости, при выполнении работ по демонтажу.
Данный демонтажный робот является одним из самых маневренных на рынке, может проходить через относительно узкие пространства. Большая часть веса самого робота расположена ниже опорно-поворотного круга, что делает его очень устойчивым. Рассматриваемый демонтажный робот может управляться на расстоянии, хоть это и является относительно редким явлением, на практике, работать с ним в узких местах, на краю высотных конструкций, на мостах, рядом с ветхими перекрытиями, не нарушая при этом технику безопасности.
Все вышеперечисленное является причиной, почему перевозить робота с гидромолотом можно практически любым грузовым автомобилем. Во время своей работы строительный робот не создает много шума, что позволяет использовать его на строительных площадках в ночное время расположенных рядом с жилыми домами.
Также, стоит отметить, что клапаны данного демонтажного робота управляются посредством электрических блоков управления, питание аппарата происходит от 32 A или 63 А тока.
Основные характеристики демонтажного робота Avant 185 представлены в табл.3.
Таблица 3.
Основные характеристики робота Avant 185
|
Скорость вращения башни, макс (настраиваемая), сек/360о |
9.5 |
|
Скорость движения, макс. км/ч |
2,8 |
|
Преодолеваемый уклон, макс, o |
30 |
|
Мощность электродвигателя, кВТ |
18,5 |
|
Горизонтальный вылет стрелы, макс, м |
5.5 |
|
Вертикальный вылет стрелы, макс, м |
4.5 |
|
Масса конструкции, кг |
До 2000 |
|
Рекомендованная масса навесного оборудования, кг |
До 275 |
Также, стоит отметить, что у данного робота имеется ряд навесного оборудования, однако их количество сильно уступает демонтажным роботам Brokk 900 и Husqvarna DXR 315, что сильно ограничивает возможности применения робота.
Таким образом, можем сделать вывод, что данная модель от компании Avant была разработана для довольно узкой направленности, такие как демонтаж конструкций в узких пространствах, в ситуациях, где может потребоваться дополнительная маневренность. Также, стоит учитывать невозможность автономной работы робота, а в ситуациях с узкими пространствами опасность оператору сильно увеличивается.
Вывод по обзору демонтажных роботов. На основании проведенного обзора существующих аналогов, был сделан вывод, что для минимизации опасности для оператора и самого робота, а также для ускорения всего процесса демонтажа необходимо реализовать систему технического зрения для автономной работы робота. Однако, стоит отметить, что отсутствие оператора, даже при наличии системы технического зрения, в случае ошибки в коде робота, может привести к большим финансовым потерям. Решением данной проблемы будет введение системы, при которой оператор будет иметь возможность контролировать работу робота, а также остановить работу робота в случае необходимости.
Функциональная схема разрабатываемой конструкции. На основе принятых решений, была реализована функциональная схема демонтажного робота, представленная на рисунке 4.
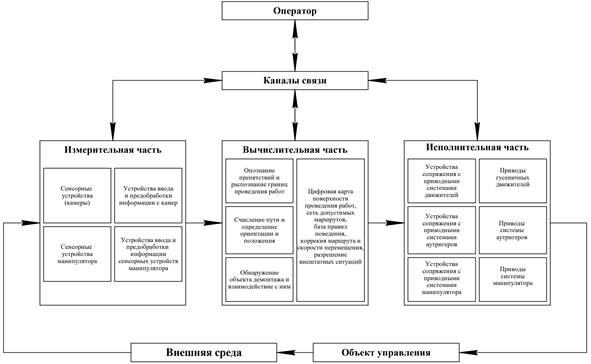
Рисунок 4. Функциональная схема демонтажного робота
Заключение. Внедрение робототехнических систем в процесс демонтажа конструкций является перспективным направлением. Роботы существенно упростят и ускорят процесс демонтажа, а также избавят человека от опасной работы. В ходе данной статьи был проведен обзор существующих робототехнических систем для демонтажа строительных конструкций, а также на основе проведенного обзора, а также была разработана функциональная схема робота для демонтажа строительных конструкций.
Список литературы:
1. Demolition and Recycling [Электронный ресурс]. – Режим доступа: https://www.demolitionandrecycling.media/news/4-attachment-options-you-can-pair-up-with-demolition-robots/8018998.article – Дата доступа: 5.12.2022.
2. Консультант Плюс [Электронный ресурс]. – Режим доступа: http://www.consultant.ru/cons/cgi/online.cgi?req=doc&base=ESU&n=10477#2gSs7rS8c72Hk9Yn1. – Дата доступа: 5.12.2022.
3. English Lloyd [Электронныйй ресурс]. – Режим доступа: https://www.englishlloyd.com/blog/2021/09/average-construction-workers-death/#:~:text=Unfortunately%2C%20a%20significant%20percentage%20of,workers%20will%20die%20every%20year. – Дата доступа: 5.12.2022.
4. Automate [Электронный ресурс]. – Режим доступа: https://www.automate.org/a3-content/service-robots-demolition. Дата доступа: 6.12.2022.
5. Raseq [Электронный ресурс]. – Режим доступа https://www.raseq.com/demolition-robots/ Дата доступа: 6.12.2022.
6. Официальный сайт компании Brokk [Электронный ресурс]. – Режим доступа https://www.brokk.com/product/brokk-900/ Дата доступа: 10.12.2022.
7. Официальный сайт компании Husqvarna [Электронный ресурс]. – Режим доступа https://www.husqvarnaconstruction.com/in/demolition-equipment/dxr315/ Дата доступа: 10.12.2022.
8. Интернет магазин спец техники Astramachine [Электронный ресурс]. – Режим доступа https://astramachine.ru/product/demontazhnyij-robot-avant-robot-185/ Дата доступа: 10.12.2022
