Статья:




Подвеска автомобиля. Активная подвеска. Существующие системы управления подвеской
Конференция: XCI Студенческая международная научно-практическая конференция «Молодежный научный форум»
Секция: Технические науки
Выходные данные
Юшков Н.С., Кромов С.И., Битюков Д.А. Подвеска автомобиля. Активная подвеска. Существующие системы управления подвеской // Молодежный научный форум: электр. сб. ст. по мат. XCI междунар. студ. науч.-практ. конф. № 22(91). URL: https://nauchforum.ru/archive/MNF_interdisciplinarity/22(91).pdf (дата обращения: 28.07.2026)
Лауреаты определены. Конференция завершена
Эта статья набрала 0 голосов
Мне нравится0
Дипломы
лауреатов
лауреатов
Сертификаты
участников
участников
Дипломы
лауреатов
лауреатов
Сертификаты
участников
участников

XCI Студенческая международная научно-практическая конференция «Молодежный научный форум»
Подвеска автомобиля. Активная подвеска. Существующие системы управления подвеской
Юшков Никита Сергеевич
студент, Балтийский Государственный Технический Университет «ВОЕНМЕХ» им. Д.Ф. Устинова, РФ, г. Санкт-Петербург
Кромов С. И.
студент, Балтийский Государственный Технический Университет «ВОЕНМЕХ» им. Д.Ф. Устинова, РФ, г. Санкт-Петербург
Битюков Дмитрий Алексеевич
студент, Балтийский Государственный Технический Университет «ВОЕНМЕХ» им. Д.Ф. Устинова, РФ, г. Санкт-Петербург
Шароватов В. Т.
научный руководитель, Балтийский Государственный Технический Университет
«ВОЕНМЕХ» им. Д.Ф. Устинова,
РФ, г. Санкт-Петербург
Подвеска автомобиля (рис. 1) выполняет одновременно несколько важных функций, от ее конструкции и рабочих характеристик зависят управляемость, устойчивость, плавность хода и другие свойства автомобиля, определяющие его безопасность, комфортность, надежность и экономичность. Так, на динамичность, устойчивость и управляемость автомобиля влияют кинематические характеристики подвески. Надежность автомобиля во многом зависит от надежности колес и подвески, так как они находятся ближе всего к дороге и подвергаются самым тяжелым условиям эксплуатации. От свойств подвески зависит физиологическое и эмоциональное состояние водителя и пассажиров, поскольку вибрации, быстрые и резкие изменения положения тела сильно утомляют человека, известно, что усталость напрямую зависит от изменений ускорения и частоты колебаний.
Основная проблема конструирования подвесок состоит в том, что требования к подвеске со стороны устойчивости, управляемости и комфортности оказываются противоречивыми. Так, с одной стороны, подвеска должна быть по возможности более мягкой, чтобы исключить отрыв колес от дорожного полотна при наезде на неровность, а также увеличить комфортность автомобиля для пассажиров и водителя, обеспечить сохранность перевозимых грузов. С другой стороны, подвеска должна быть по возможности более жесткой, чтобы увеличить устойчивость и управляемость автомобиля, именно – чтобы не возникали опасные крены на поворотах, не было клевков корпуса автомобиля при разгоне и торможении, разгружающих переднюю или заднюю оси автомобиля.
Рисунок 1. Пример подвески автомобиля
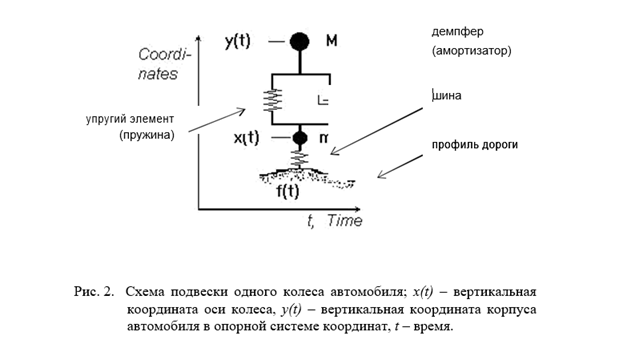
При описании подвески одного колеса учитывают (рис. 2): упругую шину, неподрессоренную массу m (колесо и части подвески), параллельно соединенные упругий (пружина) и демпфирующий ( амортизатор) элементы, которые поддерживают корпус автомобиля – подрессоренную массу M (масса ¼ части корпуса автомобиля). Упругие элементы принимают на себя удары со стороны неровностей дорожного покрытия, преобразуя их в затухающие колебательные движения, а демпфер гасит эти колебания.
Свойства подвески определяются ее характеристиками, основные из которых описывают упругость пружины и вязкость амортизатора в зависимости от различных фаз их движения.
В большинстве обычных автомобилей характеристики подвески выбираются в результате поиска компромисса между противоречивыми требованиями устойчивости, управляемости и комфортности. Характеристики подвески оптимизируют с точки зрения среднестатистических условий, в которых будет работать данный автомобиль. Рассчитывается усредненное значение массы автомобиля с учетом возможного веса его груза, оценивается и учитывается характер и качество дорожного покрытия тех дорог, для которых разрабатывается данный автомобиль, требования к динамическим свойствам данного автомобиля, зависящие от его назначения (спортивный автомобиль, пассажирский, грузовой, специальный и т.п.). Характеристики таких подвесок не меняются в процессе эксплуатации автомобиля, если не считать изменений, связанных с износом деталей подвески.
Однако очевидно, что подвеска, оптимизированная по всему диапазону условий эксплуатации автомобиля, оказывается неоптимальной в каждой из конкретных текущих дорожных ситуаций, отличающихся от расчетной среднестатистической. Так, при движении автомобиля по сравнительно гладкой дороге оптимальной является более жесткая подвеска, при движении этого же автомобиля по неровной дороге хотелось бы, чтобы подвеска становилась более мягкой. При движении по прямому участку дороги можно иметь более мягкую подвеску, увеличивающую плавность хода, а при прохождении поворотов, при разгоне и торможении подвеска должна становиться более жесткой, чтобы обеспечить устойчивость автомобиля, не допускать большого крена, тем более - опрокидывания. Хотелось бы также изменять жесткость подвески при изменении веса груза. Имеются и много других факторов, от которых могут зависеть желаемые оптимальные в текущих условиях характеристики подвески (ускорение автомобиля, радиус поворота и т.п.).
Уже давно появились попытки конструирования таких подвесок, которые позволяли бы управлять их характеристиками вручную или автоматически. Например, водителю предоставляется возможность настраивать подвеску перед выполнением конкретной поездки в соответствии с ее планируемыми свойствами. Так, в некоторых автомобилях можно изменять высоту клиренса (дорожного просвета), или жесткость подвески, выбирая из двух-трех вариантов – спортивного (жесткая подвеска) или обычного (мягкая подвеска). Например, в подвеске “Hydractive”, устанавливавшихся на автомобилях Citroen XM, упругость подвески регулировалась пневматическими амортизаторами: на каждом мосте установливалось три пневматических резервуара, работающих в роли амортизатора. У водителя имелся кран, которым он мог задействовать только два, либо все три резервуара. В первом случае подвеска становилась более жесткой, во втором – более мягкой, чем и обеспечивалось изменение свойств подвески. Водитель мог также изменить клиренс, например, в зависимости от скорости движения, качества дороги, а также при остановке автомобиля.
Иногда обеспечивается возможность изменения характеристик подвески вручную непосредственно в процессе движения автомобиля. Однако такие манипуляции могут отвлекать водителя от управления автомобилем и известны случаи, когда это увлекательное занятие приводило к авариям. Подвески, параметры которых могут изменяться с целью управления, стали называть «активными», однако это не строгий термин, и в каждом случае полезно уточнить, что именно имеется в виду. Это же касается и слова «адаптивный», под которым может пониматься что угодно, начиная от возможности регулирования подвески вручную.
Попытки построения подвесок, параметры которых изменялись бы автоматически в зависимости от некоторых текущих условий, привели к появлению различных идей, которые можно подразделить на три класса.
Один класс представлен подвесками, у которых характеристики изменяются в результате некоторых чудес механики, гидравлики или пневматики. Например, специальное устройство пружинно-листовых амортизаторов Roadmaster делает подвеску тем более жесткой, чем больше вес автомобиля. Другим примером является называемая «активно-реактивной» или «активно-пассивной» подвеска Monroe Kinetic, где гидравлические диагональные связи между подвесками каждого из четырех колес, позволяют без использования процессоров, датчиков и приводных механизмов «информировать» каждое колесо о том, что происходит с другими, создавая определенное корректирующее смещение колес в разных ситуациях, например, во время поворотов или при наезде одного колеса на препятствие. Функциональное разнообразие действий таких подвесок не велико, при этом требуется установка дополнительного сложного технического и/или гидравлического оборудования, что утяжеляет машину, снижает ее надежность.
К другому классу можно отнести подвески, системы управления которых работают на основе электронных схем или контроллеров, реализующих значение параметров подвески по некоторому детерминированному закону. Такие системы требуют оснащения подвески определенными датчиками, и исполнительными устройствами. Контролер устанавливает фиксированное отображение показаний датчиков в заранее определенные команды исполнительным устройствам, реализующим указанные значения параметров подвески. Очевидно, что таким способом можно реализовать гораздо более сложные детерминированные законы управления, чем посредством механических и гидравлических устройств. Такого рода системы могут управлять подвеской гораздо более динамичнее, чем это может делать человек-водитель, и могут делать это более точно. Основные проблемы этого класса систем связаны как с трудностями построения точной математической модели автомобильной подвески, так и с необходимостью создания специальных исполнительных устройств-актуаторов.
Поскольку автоматическая система может управлять не только выбором из двух-трех вариантов, но гораздо большим их числом, то возникает соблазн оснастить подвеску такими управляемыми элементами, которые допускали бы выбор между большим числом дискретных вариантов параметров или изменений их континуальных значений. Примером таких управляемых механизмов, которые можно было бы использовать в качестве исполнительных устройств - актуаторов в подвеске, является амортизатор с переменной вязкостью. Напомним, что демпфирующее свойство амортизатора достигается за счет того, что при сжатии или растяжении амортизатора в нем осуществляется перекачивание жидкости (масла) из одного резервуара в другой через узкий клапан. Изменяя диаметр пропускного отверстия клапана, можно в широком диапазоне изменять характеристику амортизатора. Поскольку не составляет большого труда сделать клапан с управляемым отверстием, то такой амортизатор является удобным актуатором. Амортизаторы такого типа использовались, например, в управляемых подвесках самолетов – шасси. Быстродействие такого актуатора довольно высокое, оно ограничивается возможностями переключающего механического устройства клапана. Однако еще более быстродействующим актуатором может являться амортизатор переменной вязкости, в котором в качестве жидкости используется так называемая магнито-реологическая жидкость (MRF), которая представляет собой суспензию в масле очень мелкодисперсных металлических магнитных частиц – диполей. Металлические диполи могут управляться внешним магнитным полем, создаваемым соленоидом, заставляющем их одновременно ориентироваться в заданном направлении, например, вдоль или поперек потока жидкости, что и приводит к изменению вязкости MRF в заданном направлении. Такой актуатор имеет очень высокое быстродействие, он может переключаться до 1000 раз в секунду. Высокое быстродействие системы и широкий диапазон рабочих режимов делают ее очень эффективной. Примером подвески с MRF является подвеска MagneRide, устанавливаемая на автомобилях Cadillac Catera. Помимо таких пассивных управляемых элементов подвески были разработаны также активные элементы, например, амортизатор, в который из внешнего резервуара под высоким давлением может впрыскиваться, или, наоборот, откачиваться масло. Такой амортизатор сам может активно воздействовать на автомобиль, надо лишь правильно управлять этими воздействиями. Быстродействие такого актуатора заметно уступает системам с MRF, однако в целом эффективность его может быть выше за счет активного и сильного воздействия на подвеску. Примером такого рода активной подвески является подвеска “Active Body Control” (ABC), которой с 2002 года оснащаются автомобили Mercedes Benz CL500 и CL600. При помощи гидравлики высокого давления, многочисленных датчиков и мощных микропроцессоров эта активная подвеска мгновенно подстраивает подрессоривание кузова под соответствующую дорожную ситуацию. Таким образом ABC на 68 % уменьшает перемещения кузова при разгоне, движении в повороте и при торможении. Повороты Mercedes Benz CL500 проходит со значительно меньшими кренами и обеспечивает при резких маневрах объезда более высокий уровень безопасности, чем автомобили с традиционными системами подвески. При тесте „змейка" динамический крен кузова в зависимости от ситуации снижается на 50 % по сравнению со значениями предыдущей модели СL с пассивной подвеской и демпфирующей системой. Недостатком такой системы является повышенный расход топлива, требуемый для приведение в действие такой активной подвески.
Вторая проблема, с которой сталкиваются разработчики управляемых подвесок такого класса, состоит в следующем. Закон управления актуатором в зависимости от показаний датчиков, даже если он детерминированный, должен быть рассчитан заранее и зафиксирован в каком-либо виде в контроллере. Такой закон управления рассчитывается на основании анализа математической модели динамики объекта управления - движения корпуса и подвески автомобиля в тех или иных возможных условиях. Составляется математическая модель объекта управления и находится ее обратное решение, которое указывает, какие управляющие воздействия следует развить актуатору, чтобы в текущих условиях привести объект управления к заданному желаемому состоянию. Математическая модель обычно представляет собой большую систему нелинейных дифференциальных уравнений, которые описывают движение как твердотельных элементов автомобиля, так и его осциллирующих элементов. Значения коэффициентов подбираются по результатам стендовых испытаний. Проблема состоит в том, что разработать точную математическую модель автомобиля очень трудно. Попытки учесть чуть более сложные и реалистические элементы автомобиля делают его математическую модель чрезмерно сложной и не поддающиеся расчетам. Ситуацию усложняет то обстоятельство, что свойства реального автомобиля постоянно изменяются даже в течение одной поездки – изменяется его масса в результате изменения числа пассажиров или массы груза, изменяется температурный режим, свойства конструктивных элементов, свойства дороги, режим движения. Поэтому всякая зафиксированная математическая модель в целом оказывается неверной, а качество управления, следовательно, ограничено. В этом классе существуют и адаптивные системы управления, которые строятся на эмпирическом уточнении значений параметров, при условии, что заранее известен набор характеристик, влияющих на целевую характеристику, и общий вид зависимости между характеристиками, т.е. решается задача идентификации модели. Несмотря на то, что теория этих систем весьма сильно развита, создается впечатление, что возможности классической математики для построения математических моделей такого рода объектов приближаются к своему пределу.
К третьему классу можно отнести активные подвески, управляющие системы которых строятся не на основе математических моделей, а на основе подходов, характерных для задач анализа «черного ящика», или задач управления «по прецедентам». Это системы нового поколения, основанные на идеях самообучения, автоматической работы со знаниями, с автоматическими распознающими системами, использующие нечеткую логику, нейросети, гибридные системы и т.п. подходы. Работы над такими активными подвесками ведутся в настоящее время в ряде автомобильных компаний, но особенности технологии, реализованные в анонсируемых образцах, как правило, не освещаются. Из общих соображений можно предполагать, что все такого рода системы управления активными подвесками, даже если они эвристические, можно отнести к одному из направлений, известных сегодня в области управляющих систем: это экспертные системы, системы нечеткой логики, нейросети, системы с подкрепляющим обучением. Достоинством такого рода управляющих систем является то, что они основаны не на математических моделях объектов управления. Закон управления в них получается либо в результате автоматического обучения по прецедентам, либо в результате перенесения в управляющую систему формализованных знаний человека-эксперта. Каждый из названных здесь методов управления имеет свои ограничения, особенности и недостатки, а также способы сглаживания этих недостатков. Коротко обозначим их.
Экспертные системы позволяют зафиксировать знания человека-эксперта, который хорошо принимает решения в некоторой области, и затем тиражировать эти способности. Нечеткие системы являются разновидностью экспертных систем и удобны для построения управляющих систем. Однако в своих канонических вариантах эти системы не предполагают автоматического доучивания или переучивания, т.е. автоматической адаптации, их правила принятия решений задаются вручную при конструировании таких систем. Очевидно, что в области управления подвеской не существует экспертов, умеющих быстро и правильно менять параметры подвески, к тому же здесь требуется постоянное переучивание системы управления. Нейронные сети в своем каноническом виде предназначены для распознавания образов, которым они предварительно были обучены по обучающей выборке. Переобучение нейросети в процессе работы (что собственно и обеспечивает адаптивное управление) вызывает уже серьезные проблемы. К тому же и предварительное обучение связано с трудностью подготовки обучающей выборки прецедентов, трудоемкостью обучения нейросети, проблемами сходимости. Системы с подкрепляющим обучением – одно из наиболее перспективных направлений, также имеют свои органические трудности. В каждой из названных областей проводятся исследования, направленные на поиск путей обхода соответствующих проблем.
Список литературы:
1. Жданов А.А., Метод автономного адаптивного управления // Известия Академии Наук. Теория и системы управления, 1999, № 5, с. 127-134
2. Воронов А.А. Устойчивость, управляемость, наблюдаемость. М.:Наука, 1979.
3. "За рулем" 2000 №6 - Живая вода "Московская".
4. Борисов С.В., Архипов А.И., Осипов В.И. Подвеска автомобиля: Учеб. Пособие. МАДИ ТУ, Ч.1. М.:, 1995
