Статья:




Синтез П-, ПИ-, ПИД-регуляторов системы управления числом оборотов двигателя
Секция: Технические науки
Выходные данные
Закиев И.А., Кулагина М.В. Синтез П-, ПИ-, ПИД-регуляторов системы управления числом оборотов двигателя // Технические и математические науки. Студенческий научный форум: электр. сб. ст. по мат. I междунар. студ. науч.-практ. конф. № 1(1). URL: https://nauchforum.ru/archive/SNF_tech/1(1).pdf (дата обращения: 26.07.2026)
Лауреаты определены. Конференция завершена
Эта статья набрала 0 голосов
Мне нравится0
Дипломы
лауреатов
лауреатов
Сертификаты
участников
участников
Дипломы
лауреатов
лауреатов
Сертификаты
участников
участников

I Студенческая международная научно-практическая конференция «Технические и математические науки. Студенческий научный форум»
Синтез П-, ПИ-, ПИД-регуляторов системы управления числом оборотов двигателя
Закиев Ильнар Азгамович
студент, Набережночелнинский институт (филиал) ФГАОУ ВО К(П)ФУ, РФ, г. Набережные Челны
Кулагина Марина Вячеславовна
студент, Набережночелнинский институт (филиал) ФГАОУ ВО К(П)ФУ, РФ, г. Набережные Челны
Системы автоматического управления (САУ) встречаются сегодня в каждом из отраслей производства при решении задач автоматизации. Наибольшее распространение САУ получили в электроприводах. Технические параметры САУ оказывают существенное влияние на качество и надежность автоматизированных систем управления. Функциональная схема такой системы представлена на рисунке 1.
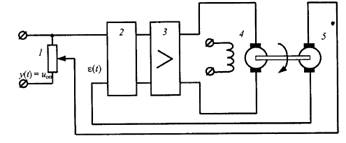
Рисунок 1. Функциональная схема замкнутой САУ
Цифрами на схеме обозначены: 1 – потенциометр, 2 – регулятор, 3 – усилитель, 4 – электродвигатель, 5 – тахогенератор.
Система замкнутого цикла отличается от системы разомкнутого цикла тем, что в системе с обратной связью имеет место сравнение реального числа оборотов двигателя с требуемым. Рассогласование (ошибка) поступает на регулятор 2 и усилитель 3; управление осуществляется сигналом ошибки е(t). Структура и параметры регулятора 2 выбираются таким образом, чтобы обеспечить высокую точность работы системы. Замкнутая система не требует точной градуировки: точность сохраняется и при «уходе» параметров системы от эталонных из-за старения или по другим причинам [1].
В настоящее время разработаны и реализованы программные средства, позволяющие осуществить процедуры анализа и синтеза систем управления. Пакет Matlab с библиотекой Simulink позволяет с минимальными затратами получить временные и частотные характеристики динамических систем и содержать процедуры синтеза автоматического управления различной конфигурации [2].
Целью работы является синтез П-, ПИ-, ПИД-регуляторов для системы управления числом оборотов двигателя.
Для достижения поставленной цели в работе можно выделить следующие задачи:
1. Синтезировать П-, ПИ-, ПИД – регуляторы, используя метод Циглера-Николса.
2. Построить временные характеристики и определить показатели качества для каждого типа регуляторов. Изменяя коэффициенты регуляторов, улучшить показатели качества, если это возможно;
3. Сравнить показатели качества переходного процесса.
Регуляторы предназначены для коррекции динамических свойств объекта управления с помощью управляющего сигнала u(t) так, чтобы выходной сигнал y(t) как можно меньше отличался от заданного желаемого сигнала g(t). При этом значение g(t) называют уставкой, а разность реального выходного сигнала и уставки называют ошибкой, которую обозначают ɛ(t).
Основным методом построения САУ является использование ПИД-регулятора (или его упрощенных вариантов: П-регулятор, ПИ-регулятор).
Структура ПИД-регулятора состоит из следующих составляющих:
· Пропорциональной (KП);
· Интегральной (KИ);
· Дифференциальной (KД).
Метод Циглера-Николса является одним из широко применяемых методов, позволяющих определить коэффициенты ПИД-регулятора. На практике используются две модификации метода Циглера-Николса: на основе запаса устойчивости и на основе переходной характеристики.
Недостатком метода на основе запаса устойчивости является необходимость вывода системы на границы устойчивости, что является нежелательным и не всегда возможным. Следовательно, воспользуемся методом на основе переходной характеристики:
1. Строится переходная характеристика объекта управления.
2. Передаточная функция объекта управления аппроксимируется апериодическим звеном первого порядка с запаздыванием.
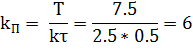
3. Определяются коэффициенты аппроксимирующей передаточной функции ![]() .
.
4. Коэффициенты ПИД-регулятора рассчитываются по формулам, приведенным в таблице 1.
Получим следующие значения коэффициентов: ![]() ,
, ![]() ,
, ![]()
Таблица 1.
Формулы для определения коэффициентов ПИД-регулятора
|
|
kП |
kИ |
kД |
|
П-регулятор |
|
- |
- |
|
ПИ-регулятор |
|
|
- |
|
ПИД-регулятор |
|
|
|
Выполним подстановку коэффициентов в формулы из таблицы 2.
Коэффициенты П-регулятора:
Коэффициенты ПИ-регулятора:
Коэффициенты ПИД-регулятора:
![]()
Определим временные характеристики для САУ – время переходного процесса ![]() и значение перерегулирования
и значение перерегулирования ![]() . Полученные результаты для регуляторов представлены в таблице 2. При использовании ПИ- и ПИД-регуляторов исследуемая система становится колебательной, следовательно, невозможно определить временные характеристики.
. Полученные результаты для регуляторов представлены в таблице 2. При использовании ПИ- и ПИД-регуляторов исследуемая система становится колебательной, следовательно, невозможно определить временные характеристики.
Таблица 2.
Значения временных характеристик регуляторов
|
|
П-регулятор |
ПИ-регулятор |
ПИД-регулятор |
|
|
7.658 |
- |
- |
|
|
34.3 |
- |
- |
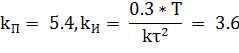
Воспользуемся пактом Simulink Response Optimization для определения коэффициентов П-, ПИ-, ПИД-регуляторов. Создадим модель САУ в Simulink (рис. 2) и проведем оптимизацию параметров для каждого типа регулятора. Графическое представление оптимизации показано на рисунке 3 (на примере П-регулятора).
Рисунок 2. Модель системы управления в Simulink
Коэффициент П-регулятора: ![]() .
.
Коэффициент ПИ-регулятора: ![]() .
.
Коэффициент ПИД-регулятора: ![]() .
.
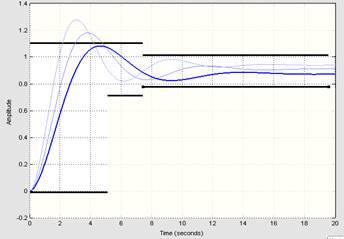
Рисунок 3. Переходная характеристика при оптимизации коэффициента П-регулятора
Значения временных характеристики регуляторов с оптимизированными коэффициентами представлены в таблице 2.
Таблица 3.
Формулы для определения коэффициентов ПИД-регулятора
|
|
П-регулятор |
ПИ-регулятор |
ПИД-регулятор |
|
|
9.84 |
13.74 |
0,.97 |
|
|
24.14 |
8.55 |
- |
Сравнив показатели качества переходных процессов для исследуемой системы управления, получили, что наилучшими показателями качества обладает ПИД-регулятор, коэффициенты которого оптимизированы с помощью программного средства Simulink Response Optimization.
Список литературы:
1. Методы классической и современной теории автоматического управления: учебник в 5 томах; 2-е изд., перераб. и доп. Т. 1: Математические модели, динамические характеристики и анализ систем управления – Москва: Издательство МГТУ им. Н.Э. Баумана, 2004, - 656 с.
2. Хардиков Е. В. Теория автоматического управления. Учебно-методическое пособие по выполнению курсовой работы. – Санкт-Петербург, 2015, 32 с.
