Статья:




Возможности и особенности применения редукторов TwinSpin в приводных системах манипуляционных и мобильных роботов
Секция: Технические науки
Выходные данные
Друк А.Д. Возможности и особенности применения редукторов TwinSpin в приводных системах манипуляционных и мобильных роботов // Технические и математические науки. Студенческий научный форум: электр. сб. ст. по мат. XLII междунар. студ. науч.-практ. конф. № 7(42). URL: https://nauchforum.ru/archive/SNF_tech/7(42).pdf (дата обращения: 26.07.2026)
Лауреаты определены. Конференция завершена
Эта статья набрала 0 голосов
Мне нравится0
Дипломы
лауреатов
лауреатов
Сертификаты
участников
участников
Дипломы
лауреатов
лауреатов
Сертификаты
участников
участников

XLII Студенческая международная научно-практическая конференция «Технические и математические науки. Студенческий научный форум»
Возможности и особенности применения редукторов TwinSpin в приводных системах манипуляционных и мобильных роботов
Друк Александр Дмитриевич
бакалавр, Московский государственный технический университет имени Н.Э. Баумана, РФ, г. Москва
Аннотация. В данной работе обсуждаются перспективы использования подшипниковых редукторов для конструирования приводов робототехнических систем. Рассмотрено проведение предварительного расчета привода.
Ключевые слова: подшипниковый редуктор, привод, TwinSpin, промышленный робот.
Промышленные роботы выполняют всё более сложные задачи. Для того, чтобы последовательность их движений протекала без помех и сложная техника была всегда готова к использованию, требуется высочайшее качество даже мельчайших деталей. Центральным элементом при этом является редуктор: он управляет пространственными движениями манипуляторов робота.
Подшипниковые редукторы TwinSpin(ТС) представляют собой высокоточные редукторы, основанные на новом редукционном механизме и решении конструкции выходного радиально-упорного подшипника. Понятие „подшипниковый редуктор“ выражает полную интеграцию высокоточной коробки передач и радиально-упорного подшипника в одом целом. Эта новая трансмиссионная концепция позволяет использовать ТС редукторы непосредственно в качестве шарниров роботов, поворотных столов или в качестве колесных коробок передач транспортных систем [1]. Подшипниковые редукторы ТС предназначены для применения, при котором нужно высокое передаточное отношение, высокая кинематическая точность, небольшой мертвый ход, высокая моментная емкость и высокая жесткость при компактной конструкции с небольшим пространством застройки и небольшой массой.
Запатентованная конструкция редуктора (рис.1) представляет собой циклоидальный механизм, основанный на принципе гибридного редуктора: интеграции в одном компактном корпусе циклоидной передачи и радиально-упорного подшипника.
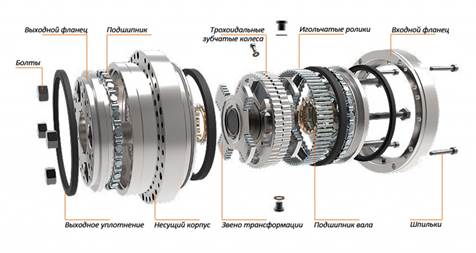
Рисунок 1. Конструкция редуктора TwinSpin
Передача крутящего момента осуществляется при этом без использования классического зубчатого зацепления трением т.к. нагрузку в конструкции в полной мере принимают и передают игольчатые ролики, расположенные в противопазах трохоидальных зубчатых колес. В результате нагрузка распределяется равномерно на возможно большее число роликов (до 50%), что, благодаря достигнутому эффекту обегающего зацепления качения, максимально уменьшает трение скольжением.
Конструкция редуктора технологически позволяет получать различные передаточные отношения до 191 в одной ступени, затормаживая корпус, входной и выходной вал, обеспечивая самые эффективные: крутящие и опрокидывающие моменты, передаточные отношения из расчета на единицу эффективной массы изделия, а также высокую жесткость на кручение. Благодаря такой конструкции приводимое в движение оборудование может обходиться без дополнительных подшипников, т.к. сам редуктор исполняет роль кинематической опоры.
Основные части подшипникового редуктора:
· Несущий корпус содержит высокоемкостные, радиально-упорные, выходные подшипники, интегрированные в редукторе. Уплотнение со стороны выходного фланца устраняет возможность внутренней контаминации (загрязнения) коробки передач или всасывание смазки из редуктора.
· Фланцы входные и выходные фланцы соединены пригнанными винтами и вращаются в радиально-упорном выходном подшипнике с редуцированной скоростью по отношению к несущему корпусу.
· Входной вал - высокооборотный член редукционного механизма. Он установлен с помощью роликоподшипников во фланцах. Орбиты подшипников расшлифованы непосредственно на вале и фланцах. На вале находятся эксцентрики, на которых вращательно опираются колеса через роликоподшипники.
· Циклоидальные зубчатые колеса, в которых почти 50% одновременно зацепляющих циклоидальных зубьев передает высокий крутящий момент, обеспечивающий беззазорный ход редуктора.
· Трансформаторный член трансформирует планетарное движение колес во вращательное движение пары фланцев.
Для задач робототехники и автоматизации редукторы TwinSpin представляют особых интерес в связи наличием исключительно трения чистого качения внутри редуктора и одной ступени редукции с очень высоким передаточным отношением, от 33 до 191 [2]. Эти два свойства улучшают финальные характеристики робота, такие как воспроизводимая точность, динамичные движения плеч, операционные расходы, низкая вибрация и низкий уровень шума.
Ключевой особенностью применения редукторов TwinSpin в робототехнических системах является возможность изменения структуры привода исполнительного органа, его скорости, а также перестраивания редуктора в процессе эксплуатации, что обеспечивается модульной конструкцией редуктора. Разработаны различные варианты соединения редуктора с серводвигателем: фланцевое; посредством ременной передачи; с помощью муфты; с использованием муфты и промежуточного фланца.
Решение интегрировать подшипники непосредственно в редуктор позволяет упростить дизайн работа, что положительно сказывается на снижении издержек производства, т.к. не требуется дополнительно устанавливать дорогостоящие и габаритные подшипники. На рис. 2 представлены промышленный робот FANUC LR MATE, все 6 приводных осей которого оснащены редукторами TwinSpin, а также манипулятор типа SCARA Wittman Robots W832 pro в котором за счет применения редукторов ТС удалось увеличить компактность привода практически без увеличения суммарного момента инерции по отношению к валу двигателя.


Рисунок 2. Промышленный робот FANUC LR Mate и Wittman Robots W832 pro с кинематикой, основанной на рычажной системе
Долговечность подшипниковых редукторов ТС зачастую обусловлена в первую очередь долговечностью роликовых подшипников на эксцентриках входного вала. Долговечность определяется по уравнению:
![]()
k -номинальная долговечность [ч], ![]() -требуемая долговечность [ч],
-требуемая долговечность [ч], ![]() -средний выходной крутящий момент [Нм],
-средний выходной крутящий момент [Нм], ![]() -средние входные обороты [об/мин],
-средние входные обороты [об/мин], ![]() -номинальный крутящий момент [Нм],
-номинальный крутящий момент [Нм], ![]() -номинальные входные обороты [об/мин]
-номинальные входные обороты [об/мин]
Что касается предельной нагрузки, благодаря роликовым выходным подшипникам, значения радиальной и осевой нагрузок практически независимы.
Опрокидывающий момент выражается уравнением:
![]()
a - плечо действия ![]() [м],
[м], ![]() - радиальная нагрузка [Н], b - плечо действия
- радиальная нагрузка [Н], b - плечо действия ![]() [м],
[м], ![]() - осевая нагрузка [Н],
- осевая нагрузка [Н], ![]() - опрокидывающий момент [Нм]
- опрокидывающий момент [Нм]
Редукторы TwinSpin могут передавать внешнюю силовую и моментную нагрузку с помощью интегрированных выходных радиально-упорных подшипников. При нагрузке выходного фланцa, угол отклонения фланца пропорционален действующему опрокидывающему моменту. Моментная жесткость ![]() - это опрокидывающий момент, при котором выходной фланец опрокидывается на угол Θ = 1'.
- это опрокидывающий момент, при котором выходной фланец опрокидывается на угол Θ = 1'.
Угол опрокидывания Θ выходного фланца (Рис. 3) определяется по уравнению:
![]()
Θ - угол опрокидывания выходного фланца [arcmin], ![]() - моментная жесткость [Nm/arcmin]
- моментная жесткость [Nm/arcmin]

Рисунок 3. Угол опрокидывания выходного фланца
Заключение:
Уникальная конструкция редукторов TwinSpin позволяет найти для них широкое применение в работотехнике. Для редукторов характерны отличные динамические характеристики, высокая торсионная жесткость и жесткость опрокидывания, плавность работы, низкие вибрации, компактный дизайн, простота монтажа, надежность и длительный срок службы. Линейка, представляемая компанией Spinea достаточно широка, и предоставляет широкий диапазон, как по типоразмерам, так и по нагрузочным коэффициентам. Использование редукторов TwinSpin положительно сказывается на стоимости производства робота, а также способствует уменьшению его габаритов и веса, с сохранением требуемых характеристик.
Список литературы:
1. Semjon J., Hajduk M., Jánoš, R., Tuleja P.: Procedure selection bearing reducer twinspin for robotic arm. In: Applied Mechanics and Materials. Vol. 245 (2013), p. 261-266
2. Подшипниковый редуктор твинспин TwinSpin. Каталог. Spinea, 2006. – 88 c.
