Статья:




Разработка управляемой роботизированной мобильной платформы
Секция: Технические науки
Выходные данные
Яременко А.М., Миронов М.М. Разработка управляемой роботизированной мобильной платформы // Технические и математические науки. Студенческий научный форум: электр. сб. ст. по мат. VI междунар. студ. науч.-практ. конф. № 6(6). URL: https://nauchforum.ru/archive/SNF_tech/6(6).pdf (дата обращения: 29.07.2026)
Лауреаты определены. Конференция завершена
Эта статья набрала 91 голос
Мне нравится91
Дипломы
лауреатов
лауреатов
Сертификаты
участников
участников
Дипломы
лауреатов
лауреатов
Сертификаты
участников
участников

VI Студенческая международная научно-практическая конференция «Технические и математические науки. Студенческий научный форум»
Разработка управляемой роботизированной мобильной платформы
Яременко Андрей Михайлович
студент, Балтийский государственный технический университет им. Д.Ф. Устинова «ВОЕНМЕХ», РФ, г. Санкт-Петербург
Миронов Матвей Максимович
студент, Балтийский государственный технический университет им. Д.Ф. Устинова «ВОЕНМЕХ», РФ, г. Санкт-Петербург
Цветков Владимир Александрович
научный руководитель, канд. техн. наук, доцент,
Балтийский государственный технический университет им. Д.Ф. Устинова «ВОЕНМЕХ»,
РФ, г. Санкт-Петербург
The development of controlled robotic mobile platform
Andrew Yaremenko
student, Baltic State Technical University named after D.F.Ustinov “VOENMEH”, Russia, S-Peterburg
Matvey Mironov
student, Baltic State Technical University named after D.F.Ustinov “VOENMEH” Russia, S-Peterburg
Vladimir Cvetkov
Candidate of Engineering Sciences, Assistant professor in Baltic State Technical University named after D.F.Ustinov “VOENMEH” Russia, S-Peterburg
Аннотация. Работа посвящена разработке роботизированной мобильной платформы с целевой системой управления. Произведены расчеты динамической модели, произведен подбор двигателей по заданным характеристикам, а также приведено подробное описание готового проекта.
Abstract. the article describes the development of robotic, mobile platform and control system for it. It was made the calculations for dynamic model, were selected DC motors and also provides a detailed description of the finished project.
Ключевые слова: контроллер, приемник, передатчик, транспортное средство, двигатель постоянного тока, гусеничная платформа, динамическая модель.
Keywords: controller, receiver, transmitter, vechile, DC motor, crawler platform, dynamic model.
Введение. Мобильный робот – это самостоятельный механизм, который способен работать как в автоматическом режиме, так и в автоматизированном. Особую популярность в мобильной робототехнике приобрели платформы, с помощью которых выполняются различные технические задачи.
Иногда очень трудно выбрать между колесной и гусеничной базами при создании робота, поскольку каждая система обладает своими особенностями и характеристиками, а также имеет свои сильные и слабые стороны. Выбор оптимальной системы зависит от нескольких факторов, в том числе тяги, давления на поверхность, подвески и рулевого управления. В случае использования гусениц обеспечивается лучшее сцепление, но для достижения наилучших результатов нужно учитывать рельеф местности. Чтобы обеспечить меньшее давление на грунт, следует выбирать гусеницы, они больше подходят для мягких поверхностей, в отличии от колес. Для мягких поверхностей можно также использовать большие шины, но это накладывает свои ограничения и не может работать в любых условиях - например, на снегу. Гусеницы могут быть использованы в случае движения по неровной местности или в случае необходимости использования высокой тяги. Робот перемещается за счет сил трения, возникающих между опорной поверхностью и гусеничным движителем робота. Проскальзывание между ведущими катками и гусеницей отсутствует, поэтому угловые скорости вращения ведущих и ведомых катков равны.
Данный статья посвящена разработке одной из таких мобильных робототехнических платформ.
Моделирование платформы. Для построения моделирующих программных комплексов, а также для расчета регуляторов для приводов мобильных роботов, требуются их динамических модели. В разрабатываемом транспортном средстве (ТС) используются приводы на основе двигателей постоянного тока (ДПТ). Большинство существующих математических моделей, описывающих динамику МР и ТС, предполагают наличие таких исходных данных, как масса, момент инерции, силы трения и т.п. Однако на практике эти исходные данные получить весьма сложно. В ряде случаев, даже фактическая масса ТС может оказаться неизвестной, не говоря уже о его моменте инерции, поэтому для построения динамических моделей мобильных роботов и ТС предлагается использовать методы, более приближенные к реальности. Прежде, чем говорить о динамической модели, следует составить кинематическую модель МР/ТС. Рассмотрим робота с гусеничным шасси (Рис. 1).
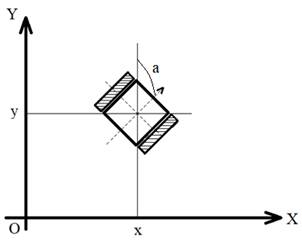
Рисунок.1. Схема моделирования ТС в пространстве
Обозначим мгновенную линейную скорость левой гусеницы через vлев, а правой vпр. Расстояние между центрами гусениц W. Пусть ТС находится на плоскости в координатах X,Y. Мгновенное значение азимутального угла направления движения обозначим через a. Положительное направление поворота по азимуту будем считать поворот от оси OY к оси OX. Направлению a=0 будет соответствовать направление вдоль мировой оси OY.
Тогда, мгновенная линейная скорость ТС ( ) будет:
) будет:
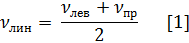
а мгновенная вращательная скорость ТС (ω):

Для примера возьмем  , тогда мгновенная линейная скорость ТС:
, тогда мгновенная линейная скорость ТС:

вращательная:

Если предположить, что робот ограничивается перемещением на плоскости, его местоположение может быть определено вектором состояния  , состоящем из трех параметров:
, состоящем из трех параметров:

 и
и  определяют местоположение предопределенной точки «центра робота» в мировой системе координат.
определяют местоположение предопределенной точки «центра робота» в мировой системе координат.
a определяет угол поворота между системами координат примем 30°.
Две системы координат совпадают в момент, когда центр робота находится в начале координат и x = y = a = 0. Тогда можно составить систему уравнений, определяющих положение ТС в пространстве:
Получая перемещения робота в некоторые моменты времени, мы можем найти весь путь, пройденный роботом, просуммировав эти значения, или перейдя к пределу (при стремлении количества измерений  ) — путем их интегрирования.
) — путем их интегрирования.
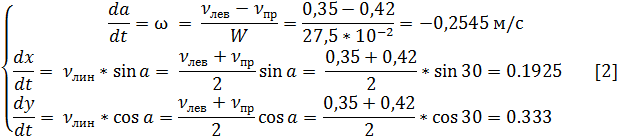
Динамическая модель платформы. Анализировать динамику ТС проще, если рассматривать модели ведущих приводов ТС. При этом необходимо все привести все силы и моменты инерции привести к валу ведущих электродвигателей.
Динамическая модель электропривода в терминах теории автоматического управления приведена на Рис. 3.
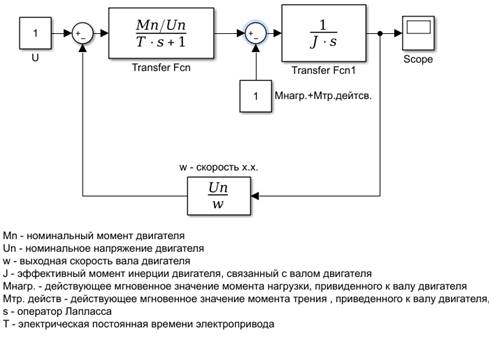
Рисунок. 2 Структурная схема электропривода
Для проведения опытов был выбран двигатель Gekko MR37-60, но из-за недостаточных данных был так же выбран и его аналог – RB-35GM.
Таблица 1
Характеристики аналога
|
Передаточное число |
30 |
|
Номинальный момент, Н*м |
1.3 |
|
Номинальный ток, мА |
262 |
|
Номинальная скорость, об/мин |
168 |
|
Момент инерции, кг*м |
0,7*10-3 |
Передаточная функция:

Подставляя все известные значения в формулу:

Используя полученную передаточную функцию, можно проводить исследования частотных характеристик. Исследуя передаточную функцию, с помощью программы Matlab, было посчитано время переходного процесса, которое составило 0.08с. Время переходного процесса удалось уменьшить до 0.025с с помощью ПИД регулятора, однако в данном проекте 0.08с является вполне оптимальным временем.
Заключение. В ходе выполнения проекта была разработана мобильная робототехническая платформа на гусеничном ходу со следующими характеристиками:
Таблица 2
Технические характеристики
|
Параметр |
Значение |
|
ДхШхВ, мм |
500х376х190 |
|
Схема |
Гусеничная |
|
Масса платформы, кг |
3,4 |
|
Скорость, м/с |
до 0.45 |
|
Диаметр приводного колеса, мм |
48 |
Модель платформы:

Рисунок. 3 – 3D модель проекта
Особенностью конструкции является повышенная проходимость платформы при малых габаритных размерах. Разработанная конструкция подвески позволяет платформе перемещаться по снегу, грязи и грунту, а повышенный клиренс позволяет преодолевать небольшие водные преграды. Так же платформа обладает усиленной защитой гусеничного узла.
Список литературы:
1. Филиппов С.А. Робототехника для детей и родителей. – СПб.: Наука, 2013. 319 с.
2. Юревич Е.И. Основы робототехники. – БХВ-Петербург, 2018, 304с.
3. Моделирование роботов и транспортных средств [Электронный ресурс].-Режим доступа. –URL: http://www.dynsoft.ru/mrmodeling.php
