Пути повышения тяговых показателей сочлененных полноприводных автомобилей
Конференция: XLIII Международная научно-практическая конференция «Научный форум: технические и физико-математические науки»
Секция: Машиностроение и машиноведение

XLIII Международная научно-практическая конференция «Научный форум: технические и физико-математические науки»

Пути повышения тяговых показателей сочлененных полноприводных автомобилей
В конструкции полноприводных автомобилей широко применяется подвеска, в которой на два ведущих колеса одного борта приходится одна рессора, концы которой соединены с балками среднего и заднего ведущих мостов, образуя продольную связь между ведущими колесами, причем, реактивные тяги воспринимают на себя скручивающие усилия, возникающие при движении по пересеченной местности (рисунок 1). Благодаря такой конструкции, средний и задний ведущие мосты, подвеска, образуют единую балансирную тележку, которая может свободно поворачиваться на осях балансиров, обеспечивая преодоление неровностей опорной поверхности (ОП) минимизируя процесс закручивания рамы. Также, ведущие мосты, благодаря реактивным тягам и рессорам, могут независимо друг от друга перемещаться в вертикальной плоскости. Балансирная подвеска ведущих мостов имеет следующие преимущества: в конструкции используются базовые мосты автомобиля; реактивные тяги позволяют двигаться по пересеченной местности с перекосом ведущих мостов; упругие рессоры передают вертикальные усилия между мостами. Вместе с тем, балансирная подвеска имеет и свои недостатки: наличие жесткой кинематической связи создает возможность перераспределения нагрузок между жестко связанными средним и задним мостом; связь через рессоры ограничивает величину хода мостов в вертикальной плоскости.


а) б)
а-трехосного автомобиля КАМАз-43105; б-трехосного автомобиля КАМАЗ "Габарит " с сочлененной рамой
Рисунок 1. Задняя подвеска полноприводных автомобилей
Также, в конструкции как землеройно-транспортных машин (рисунок 2), так и самосвалов с сочлененной рамой (рисунок 3), применяется балансирная подвеска с жестким балансиром, причем, она имеет возможность поворота вокруг точки подвеса до 15° вниз и на 25° вверх [1,c.72]. Особенностью жесткого балансира является применение в качестве упругого элемента пневматических шин ведущих колес.

Рисунок 2. Балансирная подвеска автогрейдера ДЗ-98
При движении, в узлах и агрегатах механической трансмиссии происходят потери мощности в зубчатых зацеплениях, также, на трансмиссию и колесный движитель полноприводного автомобиля действуют внешние силы, моменты и реакции (рисунок 4), приводя к потерям полезной мощности и, снижающие тяговые показатели [2,c.123]. В процессе передачи мощности от двигателя на каждую ведущую ось, происходят потери мощности, обусловленные кинематикой и конструкцией механической трансмиссии. На разных ее участках величина этих потерь различна и при распределении мощности от раздаточной коробки на передние и задние мосты, ее потери будут различны. Конструкция балансирной подвески мостов способствует возникновению процесса перераспределения действующих внешних нагрузок, и, потерю мощности на ее циркуляцию между средним и задним ведущими мостами. В этом контуре, мощность так же будет рассеиваться за счет проскальзывания и трения в области контакта ведущих колес с ОП.
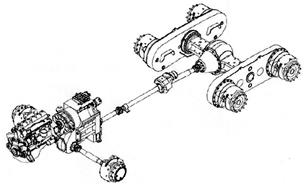
Рисунок 3. Конструкция балансирной подвески самосвала с сочлененной рамой
В то же время, за счет жесткой кинематической связи, сохраняется процесс перераспределения внешних нагрузок между средним и задним мостом, что приводит к появлению циркуляции мощности в замкнутом контуре "колесный движитель - опорная поверхность".
Рисунок 4.Потери мощности в узлах и агрегатах трансмиссии трехосного полноприводного автомобиля
Анализируя кинематическую схему трехосного полноприводного автомобиля, можно сказать, что кинематическая схема представляет собой жестко связанный механический привод на все ведущие оси. В то же время, движение машины по сложным ОП вызывает неодинаковые горизонтальную и вертикальную нагрузки по каждой оси, направленные, в том числе, по продольной оси машины, как основного вектора движения, поэтому, рассмотрение и анализ потерь на движение по основному вектору является важной, приоритетной и актуальной задачей.
Следовательно, необходимо создать новую кинематическую схему привода, позволяющую минимизировать потери мощности на ее циркуляцию в двух контурах одновременно: контур задней тележки (средний и задний мосты) и контур машины (передний мост и эквивалентный задний мост), поскольку задачи, схемы и процессы в контурах подобны друг другу, и, возможно создание однотипного контура управления между независимыми мостами. Таким образом, одновременное действие горизонтальных и вертикальных реакций ОП на ведущие колеса, а также их перераспределение между средним и задними ведущими мостами, между правым и левым бортами автомобиля, способствует возникновению явления циркулирующей мощности в замкнутом контуре "колесный движитель - опорная поверхность", снижающей до 30% тяговые показатели колесного движителя [3,c.97]. В целях повышения тяговых показателей полноприводных автомобилей, в 1966 году, инженерами НАМИ, был создан экспериментальный автомобиль НАМИ-058С (рисунок 5).

Рисунок 5. Седельный тягач НАМИ 058С
Особенностью машины являлся полный привод на все оси, в том числе и прицепа, причем, передние две оси были управляемыми. В кинематической схеме использовалась механическая трансмиссия от серийного автомобиля УРАЛ-375Д, а основным недостатком машины являлось наличие нескольких контуров циркуляции мощности: задняя балансирная тележка тягача-мосты прицепа, задняя балансирная тележка тягача-два передних ведущих моста и контуры циркуляции мощности между ними всеми. Повышение эффективности применения такого автопоезда возможно, например, за счет применения индивидуального привода ведущих колес, с автоматической системой управления, что позволит увеличенить тягово- сцепные свойства между ведущими колесами и ОП. Для экспулатации в сложных дорожных условиях был создан сочлененный полноприводный автомобиль КАМАЗ 6х6 "Габарит" (рисунок 6), но, в его конструкции использовались стандартные ведущие мосты и балансирная тележка, с указанными выше недостатками.
Рисунок 6. КАМАЗ 6х6 "Габарит" с сочлененной рамой
В целях устранения указанных недостатков механической трансмиссии и балансирной тележки, предлагается в конструкцию жестких балансиров включить индивидуальный привод ведущих колес с автоматической аппаратурой управления (патент на изобретение №2716395 "Балансирная тележка с приводом на каждое колесо"). Схема балансирной тележки с приводом на каждое колесо представлена на рисунке 7. Для создания усовершенствованного привода предлагается использовать схему с независимым электроприводом каждого колеса и жесткой балансирной подвеской.
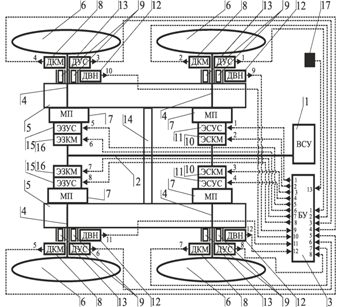
1 – вторичная силовая установка; 2 – силовая магистраль; 3 – блок управления; 4 – приводные валы колес; 5 – балансиры; 6 – колеса; 7 – приводные механизмы колес; 8 – датчики крутящего момента; 9 – подшипники приводных валов; 10 – элементы согласования по крутящему моменту; 11 – элементы согласования по угловой скорости; 12 – датчики вертикальных нагрузок; 13 – датчики угловой скорости; 14 – продольная балка балансира; 15 – элементы задающие угловую скорость; 16 – элементы задающие крутящий момент; 17 – датчик положения педали акселератора
Рисунок 7. Балансирная тележка с приводом на каждое колесо
Балансирная подвеска в данной схеме позволит сохранить контакт колеса с ОП в большом диапазоне вертикальных перемещений балансира, с одновременным управлением кинематикой движения и силовыми параметрами по каждому колесу, в соответствии с нагрузкой на них, геометрией движения и перераспределением нагрузок, что позволит минимизировать потери от действия циркуляции мощности. Сущность новой конструкции заключается в том, что дополнительно введены датчики, приборы и механизмы, обеспечивающие измерение текущих показателей нагруженности каждого колеса, и, вырабатывающие управляющие сигналы на приводы ведущих колес, с целью согласования режимов качения и перераспределения нагрузок между ними в ведущем режиме. Техническим результатом является повышение тяговых показателей колесного движителя, за счет компенсации перераспределения горизонтальных и вертикальных реакций ОП, совместно действующих на ведущие колеса при движении, приводя к повороту балансиров вокруг точки подвеса, в сторону, противоположную подводимому крутящему моменту, вызывая появление циркуляции мощности, снижающей тяговые показатели машины. Макетный образец балансирной тележки с приводом на каждое колесо показан на рисунке 8, а схема размещения балансирных тележек на сочлененном автомобиле показана на рисунке 9.

1 ‑ балансир; 2 ‑ кронштейн крепления к раме; 3 – раскос; 4 – модуль привода; 5 – ось балансира
Рисунок 8. Макетный образец балансирной тележки с приводом на каждое колесо
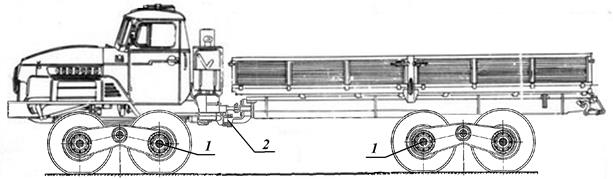
1-балансирные тележки; 2-узел сочленения полурам
Рисунок 9. Схема трансмиссии с балансирными тележками и индивидуальным приводом ведущих колес автомобиля с сочлененной рамой
Таким образом, предлагаемая новая конструкция балансирного привода ведущих колес с автоматическим индивидуальным приводом будет способствовать повышению тяговых показателей колесного движителя и показателя эффективности применения сочлененных полноприводных автомобилей.
