СИСТЕМЫ САМОНАВЕДЕНИЯ
Журнал: Научный журнал «Студенческий форум» выпуск №11(190)
Рубрика: Технические науки

Научный журнал «Студенческий форум» выпуск №11(190)
СИСТЕМЫ САМОНАВЕДЕНИЯ
Аннотация. В данной статье описываются технологии, применяемые при разработке систем самонаведения, а также типы таких систем. Освещены достоинства и недостатки систем самонаведения, применение в различных условиях.
Ключевые слова: Система самонаведения, ракета, цель, электромагнитная энергия, сигнал.
Использование и совершенствование систем самонаведения довольно актуальный вопрос в современном мире. Эти системы позволяют значительно увеличить тактико-технические характеристики ракет при их использовании, увеличивая вероятность поражения цели.
Процесс автоматического наведения ракеты на цель, в основе которого лежит использование энергии, излучаемой целью, называется самонаведением.
Сопровождение цели осуществляется с помощью головки самонаведения ракеты, автономно определяющей параметр рассогласования. В последующем формируются команды управления ракетой.
Выделяют два типа систем самонаведения: оптические и радиолокационные. В свою очередь оптические системы разделяют на тепловые, инфракрасные и световые [1, с. 30-36].
Также системы делятся на активные, полуактивные и пассивные. Формирование данного классификационного признака зависит от расположения источника энергии.
Если энергия, которую излучает или отражает цель создана самой целью или каким-либо естественным облучателем, то такое самонаведение называют пассивным. В таком случае системе самонаведения не требуется специального облучателя цели для получения информации о местонахождении или его изменении.
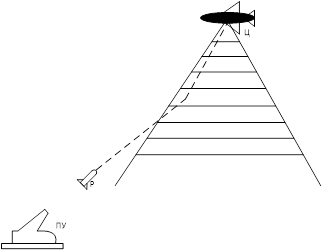
Рисунок 1. Пассивная РЛС самонаведения
В случае использования отраженной от источника энергии, создаваемой установленным на ракете облучателем, то такая система самонаведения будет являться активной.
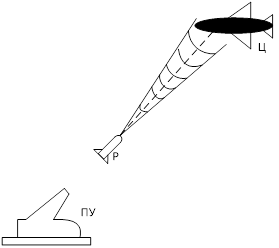
Рисунок 2. Активная РЛС самонаведения
Если облучатель расположен на удалении от ракеты или цели, но при этом система использует его для наведения, то такую систему называют полуактивной.
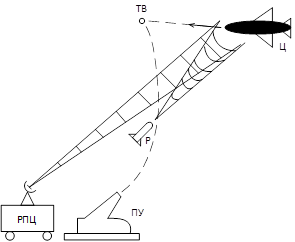
Рисунок 3. Полуактивная РЛС самонаведения
В силу независимости радиолокационных систем (далее РЛС) самонаведения от погодных условий и возможности поражения целей любых типов на различной степени дальности, они получили широкое применении в зенитно-ракетных комплексах. Такие системы используются в зенитно-управляемых ракетах как на всем участке траектории, так и в сочетании с другими управляющими системами.
Пассивное самонаведение нашло ограниченное применение в РЛС, ввиду возможности применения такого способа только при определенных условиях. Например, автомобиль с установленным на борту радиопередатчиком помех, работающим в непрерывном режиме. В связи с этим в РЛС самонаведения используют так называемое «подсвечивание» (облучение) цели. Полуактивные системы, как правило, сопровождают ракету на всем участке ее полета к цели, оперируя стоимостными и энергетическими соотношениями. В большинстве случаев источник энергии, который «подсвечивает» цель, установлен на пункте наведения. Активные системы в некоторых случаях являются более эффективными за счет того, что не требуется каким-либо образом устанавливать облучатель вблизи цели, т.к. облучатель интегрирован в головку самонаведения. За счет этого не требуется использования дополнительного оборудования для облучения цели и сигнал, по сравнению с пассивными системами, обладает большими мощностными характеристиками. Применение как активных, так и полуактивных систем свойственно комбинированным системам самонаведения. Дальность при применении активных систем самонаведения ограничивается за счет максимальной мощности, зависящей от габаритов ракеты, головки самонаведения и массы аппаратуры, находящейся на борту.
Активные системы самонаведения получают преимущество по сравнению с полуактивными в случае, если самонаведение начинается позже момента старта ракеты, а также при увеличении дальности стрельбы за счет энергетических характеристик.
Непрерывное отслеживание цели головкой самонаведения обеспечивает вычисление параметра рассогласования и последующую выработку управляющих команд, используя при этом угловые координаты. Но при использовании такого метода головка самонаведения не защищена от различного рода помех и побочной информации, также при этом не обеспечивается селекция цели по цели и дальности.
Равносигнальные методы пеленгации используются при автоматическом сопровождении цели по угловым координатам. Определение угла прихода волны, отраженной от цели, производится путем сравнения сигналов, которые были приняты по несовпадающим диаграммам направленности. Такое сравнение может производится как одновременно, так и последовательно.
Пеленгаторы с мгновенным равносигнальным направлением, определяющие угол отклонения цели с помощью суммарно-разностного способа, получили наибольшее распространение. Необходимость повышения точности автоматических систем сопровождения цели по направлению привела к появлению таких систем. Эти пеленгаторы не восприимчивы к амплитудным искажениям сигнала, отраженного от цели.
Пеленгаторы, функционирующие с использованием равносигнального направления, которое создается периодическим изменением диаграммы направленности антенны могут воспринять случайное изменение углового положения цели как случайное изменение амплитуд сигнала.
Селекция цели по скорости и дальности обуславливается характером излучения. Такое излучение может быть непрерывным или импульсным.
Селекция цели по дальности, осуществляющаяся с использованием стробирующих импульсов, которые в момент прихода сигналов от цели инициируют открытие приемника головки системы самонаведения, используется при импульсном излучении [2, с. 33-38].
Селекция цели по скорости без затруднения осуществляется при непрерывном излучении, используя эффект Доплера. Доплеровское смещение частоты отраженного от цели сигнала пропорционально радиальной составляющей скорости цели относительно наземного радиолокатора облучения и относительной скорости сближения ракеты с целью при полуактивном самонаведении, а при активном - относительной скорости сближения ракеты с целью. Сравнение сигналов, которые были приняты головкой самонаведения и радиолокатором облучения производится на ракете после того, как цель была захвачена, чтобы выделить доплеровское смещение при использовании полуактивного самонаведения. Фильтрация сигналов приемником головки самонаведения производится по принципу изменения угла приема сигналов, отраженных от цели, двигающихся с определенной относительно ракеты скоростью.
Облучение электромагнитной энергией цели осуществляется с помощью радиолокатора облучения в непрерывном режиме. Непрерывное сопровождение цели по угловым координатам обуславливается использованием направленного излучения электромагнитной энергии в РЛС. Подведя итог можно сказать, что РЛС с непрерывным автоматическим сопровождением цели – наземная часть полуактивной системы самонаведения.
В состав полуактивной головки самонаведения входит счетно-решающее устройство и координатор, сама головка устанавливается на ракете. С ее помощью происходит сопровождение цели по дальности, скорости или угловым координатам, захват цели, выработка управляющих команд и определение параметров рассогласования.
Для решения задач управления на борт зенитной управляемой ракеты устанавливается автопилот.
Помимо систем управления и самонаведения в состав зенитного ракетного комплекса устанавливается аппаратура, которая обеспечивает подготовку ракеты к пуску и сам пуск, а также наведение радиолокатора облучения на цель и др.
Диапазон волн от 1 до 5 микрометров содержит максимум теплового излучения большинства воздушных целей, в связи с этим он используется в тепловых (инфракрасных) системах самонаведения, основным преимуществом которых является возможность использования пассивного самонаведения. При его применении противнику труднее обнаружить систему или создать активную помеху [3].
Такая система не лишена недостатков – зависимость от метеоусловий ограничивает их применение. Влияние снега, тумана и дождя создают помехи для тепловых лучей, вследствие чего они затухают. Направление приема энергии также влияет на дальность полета ракеты. Именно поэтому инфракрасные системы используются в ракетах малой дальности и ближнего боя.
Масса находящихся в воздушном пространстве целей отражают свет гораздо сильнее чем их фон. Эта особенность лежит в основе световых систем самонаведения, которые используют сигнал видимой части ЭМВ.
Достоинства и недостатки таких систем схожи с инфракрасными (тепловыми) системами, но в обратной зависимости – чем метеорологические условия лучше, тем системе сложнее распознать цель среди множества солнечных или отраженных от Луны лучей.
В таблице 1 приведено сравнение различных типов систем самонаведения по основным показателям.
Таблица 1.
Сравнение систем самонаведения по основным показателям
|
Показатель |
Активная |
Пассивная |
Полуактивная |
|
Помехозащищенность |
- |
- |
+ |
|
Зависимость от метеоусловий |
+ |
- |
+/- |
|
Дальность полета |
+ |
- |
+/- |
|
Сложность технической реализации |
- |
+ |
- |
Исходя из анализа таблицы 1, можно сделать вывод, что стоит не ограничиваться применением одной из систем, а использовать их в совокупности для повышения эффективности использования и выполнения поставленных задач.
Например, в ситуации, когда точное местоположение цели неизвестно, но имеются сведения о наличии у цели постоянно работающего передатчика, рационально использовать совокупность активной и пассивной систем. Управление ракетой с момента пуска до обнаружения сигнала от передатчика цели будет производиться пассивной системой, после чего управление будет передано активной системе. Она в свою очередь с помощью передатчика, установленного на борту ракеты, установит точное местоположение цели. При использовании такого метода самонаведения вероятность поражения цели будет намного выше, а энергетические затраты меньше.
В данной статье были рассмотрены различные классификации систем самонаведения, принципы их функционирования, особенности использования, достоинства и недостатки.
