РАЗРАБОТКА РОБОТОТЕХНИЧЕСКОГО КОМПЛЕКСА ОБСЛУЖИВАНИЯ ВЕТРОГЕНЕРАТОРОВ
Журнал: Научный журнал «Студенческий форум» выпуск №8(275)
Рубрика: Технические науки

Научный журнал «Студенческий форум» выпуск №8(275)
РАЗРАБОТКА РОБОТОТЕХНИЧЕСКОГО КОМПЛЕКСА ОБСЛУЖИВАНИЯ ВЕТРОГЕНЕРАТОРОВ
Аннотация. В статье была рассмотрены современные тенденции использования и перехода на альтернативные источники энергии. Преимущества введения робототехники, аспекты ремонта и обслуживания ветрогенераторов. Произведен разбор существующих аналогов роботов. Предложена конструкция и функциональная схема будущего робототехнического комплекса.
Ключевые слова: Ветрогенератор; робот вертикального перемещения; альтернативные источники энергии; диагностика ветрогенераторов; робототехнический комплекс.
Введение. В современном мире электроэнергия — это неотъемлемая часть нашего существования. За последние 20 лет уровень потребления электричества во всем мире вырос как минимум в два раза. В России за 2021 производство и потребление электроэнергии составило порядка 1157,1 млрд кВт/ч, что на 5,4% больше, чем в прошлом году [1].
Большую часть выработанной энергии получают с помощью тепловых электростанций, а именно 69,6 % от общего объема (по данным 2019 года). Топливом для этих электростанций является нефтяной газ, каменный уголь, природный газ и другие горючие вещества. Вещества, образующиеся во время сгорания данных видов топлива, существенно влияют на экологию всей планеты.
Исходя из тенденции роста объема необходимой энергии, а также пагубного влияния продуктов сгорания тепловых электростанций и скорого истощения их запасов, все больше и больше стран рассматривают возможность перехода на альтернативные источники энергии. Альтернативные источники энергии — это возобновляемые энергетические ресурсы, которые получают благодаря использованию гидроэнергии, энергии ветра, солнечной энергии, геотермальной энергии, биомассы и энергии приливов и отливов. В отличие от ископаемых видов топлива эти источники энергии не истощаются, поэтому их называют возобновляемыми. Только за 2019 год по всему миру установлено объектов возобновляемых источников энергии на 200 ГВт.
Ветряные электростанции, как один из основных источников альтернативной энергии, представляют из себя несколько ветроэлектрических установок собранных в одном или нескольких местах, объединенные в общую сеть. Такие ветрогенераторы нуждаются в постоянном обслуживании и осмотре. Сейчас это в основном выполняется людьми, однако для развития данной отрасли энергетики, а также для снижения рисков здоровья людей, необходимо использовать роботов.
В ходе работы ветрогенераторы требуют постоянного обслуживания и ремонта, поскольку представляют собой сложные механизмы, подвергаемые как воздействию всевозможных агрессивных атмосферных факторов и значительной ветровой нагрузке. Для поддержания ветроустановки в рабочем состоянии необходимо регулярно проводить следующие процедуры:
- Полный осмотр и обследование всего агрегата
- Частичный и полный ремонт механических устройств, а также электрической и электронной начинки
- Периодичный ремонт или замена лопастей
- Регулярный осмотр на наличие коррозии и проверка качества крепления (отсутствие не подкрученных болтов)
- Чистка и мойка всей ветряной установки
- Дополнительные необходимые мероприятия по демонтажу и установки дополнительного оборудования
Для некоторых из данных процедур можно использовать робототехнику, что существенно поднимет эффективность самостоятельной работы и упростит задачу обслуживания ветрогенераторов.
Существующие аналоги. На данный момент существует несколько роботов способных участвовать в процессе обслуживания ветряков.
Английская компания Ore Catapult разработала робота способного проводить обследование ветрогенераторов практически самостоятельно. Этот робот имеет название BladeBug [2]. Данный робот разрабатывался с 2014 года специально для введения в морскую ветроэнергетику. Он представляет из себя шестиногого робота, снабженного присосками для крепления. Данная конструкция была выбрана исходя из особенностей строения лопастей ветрогенераторов, Лопасти имеют круглую форму в том месте, где они соединяются с ротором, и сплющиваются дальше по длине лопасти. Вид робота без дополнительных обвесов представлен на рис.1.

Рисунок 1. BladeBug без обвесов
Для обнаружения дефектов и микротрещин на поверхностях лопастей и оснований ветряков, робота снаряжают специальными бортовыми камерами и датчиками. Компания Ore Catapult утверждает, что BladeBUG может снизить затраты на техническое обслуживание и ремонт на 30-50 процентов, поскольку он может работать в погодных условиях, которые невозможны для людей, которым приходится спускаться по лопастям для проведения проверок.
Исследователи из немецкого института производственной эксплуатации и автоматизации Фраунгофера заинтересовались проблемой загрязнения и поломки ветрогенераторов. Поэтому они разработали робота Riwea Blade Cleaning [3] способного выполнять задачу технического обслуживания. Он представляет из себя робота, изготовленного из армированного стекловолокном пластика, оснащенного инфракрасным излучателем, который отводит тепло к поверхности лопастей ротора, тепловизорной камерой высокого разрешения, которая регистрирует температурный режим, ультразвуковой системой и камерой высокого разрешения. Робот передвигается с помощью веревок, заранее закрепленных на ветрогенераторе (рис.2).
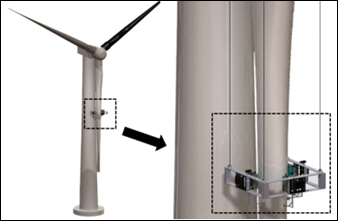
Рисунок 2. Внешний вид и перемещение робота RIWEA
Робот может подняться по лопасти мощностью 5 МВт (65 м ~ 70 м) примерно за 12 минут, так как он может двигаться вертикально со скоростью 0,1 м / с. Во время этого выполняет очистку лопастей ветрогенератора, разбрызгивая воду с помощью специального водомета. Каждая очистка и установка на лопасть занимают 20 минут, поэтому, учитывая все время, необходимое для этой процедуры, для завершения процедуры очистки требуется всего 64 минуты на одну лопасть. Это позволяет сэкономить время очистки на 3 часа по сравнению с ручной очисткой.
Предложенный технический концепт. Для формирования технического концепта были приняты следующие условия: выполнение сервисного обслуживание, а именно внешний осмотр и диагностику, множества ветрогенераторов расположенных в поле, то есть в непосредственной доступности.
Для выполнения задачи технического обслуживания предлагается следующий технический концепт.
Робототехнический комплекс, состоящий из двух роботов. Первый робот: Транспортный робот, передвигающийся с помощью колес, способный перевозить груз, в качестве второго робота, оснащенный системой локальной и глобальной навигации и дополнительным аккумуляторами для подзарядки второго робота.
Второй робот: Сервисный робот вертикального перемещения, оснащенный ультразвуковой системой и камерой высокого разрешения для выполнения диагностики ветрогенераторов.
Транспортный робот представляет из себя подобие электромашины, самостоятельно управляющей своим движением, для этого в корпус устанавливается электродвигатель, для движения по прямой и привода для обеспечения маневров. К обмоткам электродвигателя подключена система управления двигателем, которая, в свою очередь, получается сигналы управления из главной системы управления. Робот оснащен собственным аккумулятором, способным к зарядке непосредственно от ветрогенераторов с помощью преобразователя, питающим все системы, а также передающим заряд более маленькому по объему аккумулятору, для подзарядки второго робота. Для глобального поиска маршрута в систему заложена карта ВЭС, для локального поиска маршрута в случае непредвиденных обстоятельств присутствуют датчики положения и расстояния. Также транспортный робот оснащен внешними каналами связи, для установки соединения и получения команд с локального центра связи. Для взаимодействия со вторым роботом необходимо установить захват с подъемником. Далее на рисунке 3 будет представлена функциональная схема данного робота:
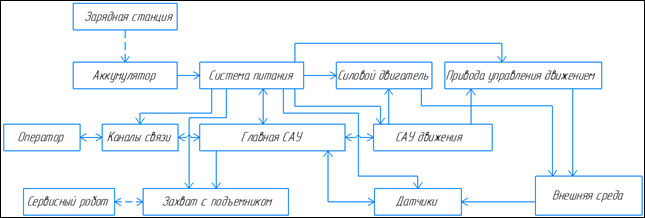
Рисунок 3. Функциональная схема транспортного робота
Сервисный робот представляет из себя вертикального робота со скользящим уплотнением. Механическая система данного типа роботов представляет из себя корпус в виде перевернутой тарелки, блока воздушного насоса, блока двигателей, включающих два мотора постоянного тока и два колеса и скользящего уплотнения, которое находится на нижней поверхности робота, а также необходимо иметь камеру разрежения, находящуюся во внутренней полости корпуса. Управляются привода насоса и колес с помощью систем автоматического управления движением, которые в свою очередь управляются главной системой управления. Робот оснащен собственным аккумулятором, заряжаемым от транспортного робота. Он также снабжен ультразвуковой системой и камерой высокого разрешения, как для собственного перемещения, так и для выполнения диагностики ветрогенератора. Имеются каналы связи и специальные выемки для захвата транспортного робота. Функциональная схема данного робота представлена на рис. 4.
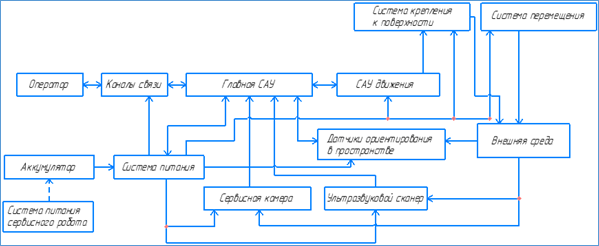
Рисунок 4. Функциональная схема вертикального робота
Заключение. В ходе выполнения проекта были рассмотрены текущие тенденции использования альтернативных источников энергии, возможности и преимущества введения робототехники, существующие аналоги. А также предложен концепт робототехнического комплекса по обслуживанию ветряков.
