ПРИНЦИПЫ ПОСТРОЕНИЯ СИСТЕМ ФОРМИРОВАНИЯ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ НА ПРИМЕРЕ АКТИВНОЙ РАДИОЛОКАЦИОННОЙ СИСТЕМЫ
Журнал: Научный журнал «Студенческий форум» выпуск №23(332)
Рубрика: Физико-математические науки

Научный журнал «Студенческий форум» выпуск №23(332)
ПРИНЦИПЫ ПОСТРОЕНИЯ СИСТЕМ ФОРМИРОВАНИЯ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ НА ПРИМЕРЕ АКТИВНОЙ РАДИОЛОКАЦИОННОЙ СИСТЕМЫ
PRINCIPLES OF BUILDING RADAR IMAGING SYSTEMS ON THE EXAMPLE OF ACTIVE RADAR SYSTEM
Vyacheslav Hyshov
Student, D.F. Ustinov Baltic State Technical University “VOENMEKH”, Russia, St. Petersburg
Аннотация. В статье описаны принципы построения систем формирования радиолокационного изображения на примере активной радиолокационной системы. Формирование диаграммы направленности активной радиолокационной системы, структура и алгоритм обработки траекторного сигнала, структура самой активной радиолокационной системы, а также описано влияние весовой функции на радиолокационное изображение.
Abstract. The paper describes the principles of construction of radar image formation systems on the example of active radar system. The formation of the directional pattern of the active radar system, the structure and algorithm of the trajectory signal processing, the structure of the active radar system itself, and the influence of the weight function on the radar image is described.
Ключевые слова: радиолокационное изображение (РЛИ), диаграмма направленности (ДН), весовая функция.
Keywords: radar image (RI), directional pattern (DN), weight function.
Введение
Радиолокация активных систем (РАС) – одно из наиболее перспективных направлений в радиолокации, возникшее в конце 1950-х годов и быстро завоевавшее широкую популярность. Ключевым достоинством этого направления является значительное (в 1000 раз и более) увеличение угловой разрешающей способности станции радиолокации. Благодаря этому можно формировать радиолокационные изображения объектов в любое время, при любом уровне освещении, то есть как днем, так и ночью, независимо от метеорологических условий, то есть погоды, также и расстояния до цели.
Активные радиолокационные системы являются в наше время уникальным бортовым техническим средством, которое способно создавать изображение местности, также расположенных на ней объектов, по качеству сравнимое с аэрофотоснимками. На начальном этапе развития данного направления основные успехи были связаны с существенным повышением эффективности воздушной и космической разведки.
Сейчас эта технология используется в разведывательно-ударных комплексах, многофункциональных РЛС самолетов для выявления малоразмерных и групповых целей и наведения на них управляемого оружия, в РЛС кругового обзора, системах радиотехнической разведки и навигации [1].
В предлагаемой ко вниманию статье описывается моделирование радиолокационного изображения точечной цели на примере активной радиолокационной системы.
Специфика активной радиолокационной системы
Ключевое различие между рассматриваемыми апертурами и традиционными антенными апертурами заключается в том, что апертура РАС формируется не одномоментно, а поэтапно во времени. В каждый конкретный момент времени прием электромагнитного сигнала осуществляется физической апертурой антенны. Апертура РАС, в свою очередь, представляет собой фиксацию электромагнитного сигнала во времени, произведенная фактической апертурой, перемещающейся в различные точки относительно излучателя. (рис. 1).
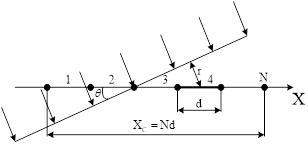
Рисунок 1. Создание диаграммы направленности посредством апертуры антенны РАС
Сканирование происходит радаром, который перемещается по прямой и последовательно занимает положения, отмеченные на изображении точками от 1 до N. В каждой из этих точек радарный модуль выполняет функции передачи и приема, отправляя в пространство зондирующий сигнал и регистрируя отражение от цели, представленной в виде точечного объекта. Волна, распространяющаяся от радара, имеет плоскую структуру, а её фронт ориентирован под углом θ относительно линии движения сканера.
Сигнальный процессор РЛС оснащен блоком памяти, предназначенным для записи амплитудных и фазовых характеристик принимаемого сигнала в каждой позиции антенны. Это позволяет получить траекторный сигнал, схожий по распределению поля с обычной антенной.
Особое устройство отвечает за перемещение антенны по прямой линии. Бортовой вычислитель управляет отправкой и получением радиолокационных сигналов, согласуя их с текущей точкой расположения сканирующего элемента на заданной траектории.
После приема информации, процессор сигналов производит сложение накопленных откликов, корректируя их на величину фазовых изменений для достижения синфазности. Учитывая, что размер антенны обозначен как ![]() и шаг перемещения также равен
и шаг перемещения также равен ![]() , а дистанция сдвига аналогична, формируется почти цельная апертура с габаритами
, а дистанция сдвига аналогична, формируется почти цельная апертура с габаритами ![]() . Характеристика направленности этой сформированной апертуры при приеме сигнала аналогична характеристике направленности физической антенны.
. Характеристика направленности этой сформированной апертуры при приеме сигнала аналогична характеристике направленности физической антенны.
В итоге, ширина луча радара с синтезированной апертурой (SAR) оказывается меньше, чем у обычной антенны с сопоставимыми габаритами, что можно выразить выражением 1:
![]()
Ключевой вывод заключается в том, что эффективная апертура активной антенной решетки оказалась в ![]() раз больше чем размер реальной апертуры.
раз больше чем размер реальной апертуры.
Вследствие этого, угловое разрешение при приеме сигналов определяется отношением ![]() характеризующим относительные размеры апертуры активной системы, которая формируется благодаря перемещению реальной антенны. Значительный размер апертуры активной системы позволяет достичь высокого разрешения по угловой координате даже на значительном удалении.
характеризующим относительные размеры апертуры активной системы, которая формируется благодаря перемещению реальной антенны. Значительный размер апертуры активной системы позволяет достичь высокого разрешения по угловой координате даже на значительном удалении.
При типичном значении апертуры САР в 300 метров и длине волны 3 см, можно рассчитать, что на дистанции в 100 км линейное разрешение по угловой координате составит 5 метров, что соответствует требованиям радиовидения [1].
Исследовав основное достоинство САР, рассмотрим процесс формирования радиолокационного изображения (РЛИ) на примере точечного объекта. Примем допущение, что антенна зафиксирована под прямым углом (90 градусов) относительно направления движения летательного аппарата (ЛА). Траектория полета ЛА прямолинейна и проходит на постоянной высоте. [2].
Чтобы глубже понять преобразование полученного сигнала, вплоть до формирования радиолокационного изображения (РЛИ), рекомендуется разделить весь процесс на несколько последовательных шагов, представленных на схеме, изображенной на рисунке 2.
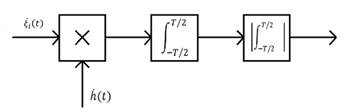
Рисунок 2. Структура схема обработки полученного траекторного сигнала
Первоначально микс ![]() из отраженного сигнала
из отраженного сигнала ![]() и шума
и шума ![]() подвергается умножению на опорную функцию
подвергается умножению на опорную функцию ![]() . В качестве опорной выбирается взвешенная функция, определенная с высокой точностью относительно начальной фазы:
. В качестве опорной выбирается взвешенная функция, определенная с высокой точностью относительно начальной фазы:
![]()
![]()
Затем происходит процесс накопления взвешенного сигнала.

В ходе данной процедуры достигается оптимизация соотношения сигнал/помеха и происходит интеграция в общую апертуру активной системы. Это ведет к увеличению разрешающей способности. Генерация сигнала РЛС реализуется посредством нелинейной обработки, которая сводится к определению абсолютного значения выходного сигнала линейной части системы обработки гидроакустических сигналов. [3]:
![]()
Данная операция позволяет нейтрализовать влияние случайной начальной фазы отраженного сигнала, а также устранить мнимую часть в итоговой формуле РЛИ. Как итог, формируется диаграмма направленности (ДН), которая описывает РЛИ [4].
На основании математической модели РАС можно предложить структуру моделирования РЛИ точечной цели. (рис. 3)
Формирование диаграммы направленности РЛИ
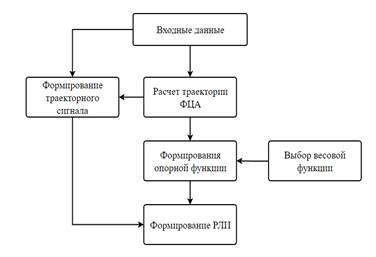
Рисунок 3. Структура модели РАС
В качестве входных данных используются: скорость полета, высота, протяженность моделируемого участка, протяженность интервала обработки сигнала, длина волны и т.д.
С учетом того, что высота полета и скорость полета постоянные, траектория полета может быть представлена в виде выражения [5].
![]()
Имея данные о траектории движения ЛА, можно рассчитать опорные функции, просуммировав сигналы на интервале синтезирования:
![]()
![]()
Если просуммировать отраженные сигналы на всем интервале полета, всеми попадающими раскрыв диаграммы направленности антенны (ДНА) целями, то можно получить отраженный сигнал:
![]()
![]()
Реализуя алгоритм свертки и взяв модуль, можно получить ДН (рис. 4) описывающую РЛИ точечной цели:
![]()
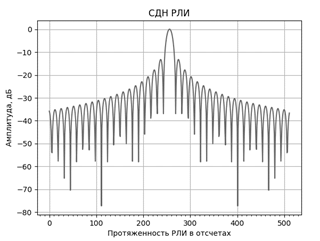
Рисунок 4. ДН РЛИ
Анализ ДН показали влияние боковых лепестков ДН на РЛИ. В результате, для того, чтобы уменьшить влияние боковых лепестков на РЛИ, необходимо учитывать весовую функцию в выражениях опорных сигналов, например, использовать гауссовскую весовую функцию (При расчетах и моделировании, весовая функция ![]() ).
).
