Статья:




Структура и алгоритм функционирования адаптивной системы подвижной авиационной связи (АСПАС)
Конференция: CXXVI Студенческая международная научно-практическая конференция «Молодежный научный форум»
Секция: Технические науки
Выходные данные
Бухтиярова А.В. Структура и алгоритм функционирования адаптивной системы подвижной авиационной связи (АСПАС) // Молодежный научный форум: электр. сб. ст. по мат. CXXVI междунар. студ. науч.-практ. конф. № 16(126). URL: https://nauchforum.ru/archive/MNF_interdisciplinarity/16(126).pdf (дата обращения: 25.07.2026)
Лауреаты определены. Конференция завершена
Эта статья набрала 0 голосов
Мне нравится0
Дипломы
лауреатов
лауреатов
Сертификаты
участников
участников
Дипломы
лауреатов
лауреатов
Сертификаты
участников
участников

CXXVI Студенческая международная научно-практическая конференция «Молодежный научный форум»
Структура и алгоритм функционирования адаптивной системы подвижной авиационной связи (АСПАС)
Бухтиярова Анна Витальевна
магистрант, кафедра «Радиоэлектроника», Донской государственный технический университет, РФ, г. Ростов-на-Дону
Елисеев Александр Вячеславович
научный руководитель, д-р техн. наук, профессор кафедры
«Радиоэлектроника»,
Донской государственный технический университет,
РФ, г. Ростов-на-Дону
Наличие устойчивой связи между наземными центрами управления воздушным движением (УВД) и летательными аппаратами (ЛА) является важнейшим критерием для обеспечения безопасности воздушного движения. В штатных условиях взаимодействие центра УВД с ЛА происходит в пределах зоны обслуживания центра УВД [1]. При этом используются всенаправленные наземные антенны, обеспечивающие возможность одновременного приема сигналов от всех ВС, находящихся в зоне обслуживания. Наряду с указанным достоинством существующая технология связи обладает таким недостатком, как сложность организации адресной связи с конкретным ЛА при одновременном снижении влияния на помехоустойчивость связи сигналов от других ЛА, рассматриваемых в конкретной ситуации как источники помеховых сигналов. В случае возникновение нештатных ситуаций, когда расстояние до ЛА может существенно увеличиться или в канале связи возникают помехи высокого уровня, целесообразно использовать направленные антенны, обеспечивающие электронное сканирование лучом для сопровождения ЛА, а также адаптацию диаграммы направленности (ДН) для уменьшения влияния помехового сигнала. Так, адаптивные антенные решетки (АР) позволяют решить поставленную задачу и получить излучение высокой направленности [2]. Однако, остронаправленный прием адаптивных АР затрудняет обеспечение связи сразу с несколькими ЛА. С этой целью была предложена структура адаптивной системы подвижной авиационной связи (АСПАС), реализующая три режима работы, определяемые воздушной обстановкой, и позволяющие организовать работу: а) в режиме адресной связи «АСв» с конкретным воздушным судном; б) в режиме общей связи «ОСв», обеспечивая всенаправленный прием сигналов; в) в режиме комбинированной связи «КСв», обеспечивая как всенаправленный прием, так и адресную связь с конкретным воздушным судном.
Предлагаемая структура АСПАС представлена на рисунке 1.
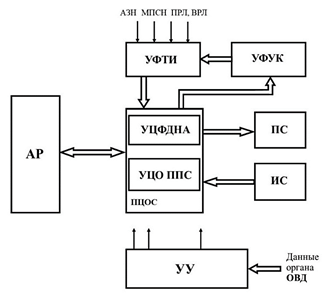
Рисунок 1. Структурная схема АСПАС
Приведенная на рисунке 1 система содержит следующие устройства: АР– антенная решетка; УФУК – устройство формирования угловых координат; ПЦОС – подсистему цифровой обработки сигналов, включающую в себя два основных устройства: УЦФДНА – устройство цифрового формирования диаграммы направленности антенны, УЦО ППС – устройство цифровой обработки передаваемых и принимаемых сигналов; УУ – устройство управления; ИС – источник сообщений; ПС – получатель сообщений.
Следует отметить, что АР является многосекционной, что обеспечивает возможность связи с ЛА, находящимися на различных направлениях. На основе рассмотренной выше структурной схемы АСПАС разработан следующий алгоритм её функционирования:
1. Задание режима работы (РР). Задание РР определяется согласно условиям организации связи, а также цепями организации канала связи.
2. Определение оценок координат ЛА ![]()
![]() , где
, где ![]() – количество ЛА, находящихся в зоне авиационного наблюдения. Данные о местоположении ЛА в УФТИ поступают от систем наблюдения. При этом в качестве систем наблюдения могут использоваться: первичные и вторичные локаторы (ПРЛ, ВРЛ), многопозиционные системы наблюдения (МПСН), системы автоматического зависимого наблюдения (АЗН) [3]. Для обработки траекторной информации от этих систем могут быть использованы алгоритмы [4, 5].
– количество ЛА, находящихся в зоне авиационного наблюдения. Данные о местоположении ЛА в УФТИ поступают от систем наблюдения. При этом в качестве систем наблюдения могут использоваться: первичные и вторичные локаторы (ПРЛ, ВРЛ), многопозиционные системы наблюдения (МПСН), системы автоматического зависимого наблюдения (АЗН) [3]. Для обработки траекторной информации от этих систем могут быть использованы алгоритмы [4, 5].
3. Формирование ДН АР, согласно выбранному режиму работы АСПАС.
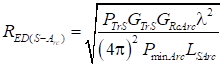
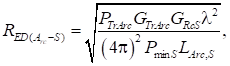
4. Определение возможности установления связи между наземным центром АСПАС, и конкретным ЛАi, ![]() , координаты которого были оценены на выходе УФТИ, согласно следующему критерию:
, координаты которого были оценены на выходе УФТИ, согласно следующему критерию:
 (1)
(1)
где ![]() – расстояние между АСПАС и ЛАi,
– расстояние между АСПАС и ЛАi, ![]() ;
;
![]() – геометрическая дальность действия радиолинии «АСПАС – ЛАi»;
– геометрическая дальность действия радиолинии «АСПАС – ЛАi»;
![]() – энергетическая дальность действия.
– энергетическая дальность действия.
Используемые в (1) дальности определяются следующим образом:
![]()
![]() (2)
(2)
![]() (3)
(3)
![]() (4)
(4)
 (5)
(5)
 (6)
(6)
где ![]() – координаты фазового центра АР АСПАС;
– координаты фазового центра АР АСПАС;
![]() – координаты ЛАi,
– координаты ЛАi, ![]() в текущий момент времени;
в текущий момент времени;
![]() – мощность передатчика АСПАС и мощность бортового передатчика системы связи ЛА, соответственно;
– мощность передатчика АСПАС и мощность бортового передатчика системы связи ЛА, соответственно;
![]() – коэффициенты усиления передающих антенн, соответственно, АСПАС и бортовой системы ОВЧ-связи;
– коэффициенты усиления передающих антенн, соответственно, АСПАС и бортовой системы ОВЧ-связи;
![]() – коэффициенты усиления приемных антенн, соответственно, АР АСПАС и бортовой системы ОВЧ-связи;
– коэффициенты усиления приемных антенн, соответственно, АР АСПАС и бортовой системы ОВЧ-связи;
![]() –чувствительность радиоприемных устройств, соответственно, АР АСПАС и бортовой системы ОВЧ-связи;
–чувствительность радиоприемных устройств, соответственно, АР АСПАС и бортовой системы ОВЧ-связи;
![]() – длина волны сигнала;
– длина волны сигнала;
![]() – потери в каналах связи «АСПАС – ЛА» и «ЛА – АСПАС»;
– потери в каналах связи «АСПАС – ЛА» и «ЛА – АСПАС»;
![]() – высоты передающей и приемной антенн, м.
– высоты передающей и приемной антенн, м.
5. Сопровождение ЛА в режиме адресной связи «АСв» путем электронного сканирования лучом АР. Для этого выполняется определение фазовых сдвигов для каждого канала АР (![]() ), обеспечивающих ориентацию луча АР в направление ЛА:
), обеспечивающих ориентацию луча АР в направление ЛА:
![]() (7)
(7)
 (8)
(8)
где ![]() – временные задержки между поступающими сигналами;
– временные задержки между поступающими сигналами;
![]() –разность расстояний, прошедших лучами, принимаемыми на двух соседних АЭ АР;
–разность расстояний, прошедших лучами, принимаемыми на двух соседних АЭ АР;
![]() – скорость электромагнитной волны,
– скорость электромагнитной волны, ![]() м/с.
м/с.
6. Установление связи между АСПАС и ЛА.
Перечисленные операции (1–6) выполняются регулярно с определенным временным шагом ![]() , который зависит от темпа поступления траекторной информации и вычислительных возможностей программных и аппаратных средств, используемых при реализации АСПАС. Следует отметить, что АСПАС, использующая в своем составе АР и УФУК, может также использоваться для определения угловых координат ВС, что обеспечит информационное резервирование системы авиационного наблюдения.
, который зависит от темпа поступления траекторной информации и вычислительных возможностей программных и аппаратных средств, используемых при реализации АСПАС. Следует отметить, что АСПАС, использующая в своем составе АР и УФУК, может также использоваться для определения угловых координат ВС, что обеспечит информационное резервирование системы авиационного наблюдения.
Список литературы:
1. Силяков В.А., Красюк В.Н. Системы авиационной радиосвязи. -Санкт-Петербург, 2004. – 156 с.
2. Адаптивные антенные решетки. Учебное пособие в 2-ух частях. Часть 2.: В.А. Григорьев, С.С. Щесняк, В.Л. Гулюшин, Ю.А. Распаев, И.А. Хворов, Щесняк А.С./ под общ. ред. В.А. Григорьева. – СПб: Университет ИТМО, 2016. – с. 118.
3. Бухтиярова А.В., Елисеев А.В. Анализ методов подтверждения данных АЗН-В. В книге: Актуальные проблемы науки и техники. 2020. Материалы национальной научно-практической конференции. Отв. редактор Н.А. Шев-ченко. 2020. С. 1490-1492.
4. Елисеев А.В., Ануфриев К.В., Погорелов Р.А., Рубайло Д.Э. Алгоритм адаптивной настройки параметров линейного дискретного фильтра с исполь-зованием нечеткой экспертной системы. Радиотехника. 2019. Т. 83. № 7 (9). С. 89-102.
5. Eliseev A., Sokolova O. Algorithm of linear discrete filtering with fuzzy modification of structure. В сборнике: IOP Conference Series: Materials Science and Engineering. XV International Scientific-Technical Conference "Dynamics of Technical Systems". 2019. С. 012036.
