Статья:




МЕТОД ОПРЕДЕЛЕНИЯ ЧЕЛОВЕКА НА МЕСТНОСТИ В РАМКАХ ВЫПОЛНЕНИЯ СПАСАТЕЛЬНОЙ ОПЕРАЦИИ
Конференция: CCXXVI Студенческая международная научно-практическая конференция «Молодежный научный форум»
Секция: Технические науки
Выходные данные
Молодцова Т.С. МЕТОД ОПРЕДЕЛЕНИЯ ЧЕЛОВЕКА НА МЕСТНОСТИ В РАМКАХ ВЫПОЛНЕНИЯ СПАСАТЕЛЬНОЙ ОПЕРАЦИИ // Молодежный научный форум: электр. сб. ст. по мат. CCXXVI междунар. студ. науч.-практ. конф. № 35(226). URL: https://nauchforum.ru/archive/MNF_interdisciplinarity/35(226).pdf (дата обращения: 25.07.2026)
Лауреаты определены. Конференция завершена
Эта статья набрала 0 голосов
Мне нравится0
Дипломы
лауреатов
лауреатов
Сертификаты
участников
участников
Дипломы
лауреатов
лауреатов
Сертификаты
участников
участников

CCXXVI Студенческая международная научно-практическая конференция «Молодежный научный форум»
МЕТОД ОПРЕДЕЛЕНИЯ ЧЕЛОВЕКА НА МЕСТНОСТИ В РАМКАХ ВЫПОЛНЕНИЯ СПАСАТЕЛЬНОЙ ОПЕРАЦИИ
Молодцова Тамара Сергеевна
магистрант, ФГБОУ ВО Рязанский государственный радиотехнический университет им. В.Ф. Уткина, РФ, г. Рязань
По данным Единой межведомственной информационно-статистической системы, которая основывается на квартальных отчетах МВД России о розыскной и идентификационной деятельности, ежегодно в стране разыскивается свыше 120 тыс. человек, из них 30% не связаны с органами дознания, следствием или судом и считаются пропавшими без вести[2]. Практика решения данной проблемы состоит, в основном, в привлечении к процессу поиска пропавших дополнительного человеческого ресурса – общественных организаций. По данным одного из крупных поисково-спасательных отрядов «ЛизаАлерт» за 2022г. была подана 42491 заявка на поиск пропавшего человека[6], что требует задействовать много ценного человеческого ресурса.
Для обследования открытых территорий (водоемов, болот, полей, больших полян), значимых линейных ориентиров (линий электропередач, дорог, просек), на которых предположительно находится пропавший человек, наиболее эффективно использовать беспилотные летательные аппараты, в связи с их высокой скоростью и свободой перемещения. Коптер, автоматически или дистанционно управляемый, фотографирует заданный квадрат местности и возвращается обратно на пункт сбора, где волонтеры проверяют фотоматериалы на признак присутствия на них человека. За один пролет БПЛА делает около 2500 снимков, зачастую, чтобы покрыть область поиска, требуется несколько таких пролетов. Предположим, что на обработку одной фотографии человек затратит 5 секунд, тогда на обработку фотоматериалов только одного пролета уйдет 4 часа непрерывной работы, что в условиях спасательной операции, где время играет решающую роль – недопустимо.
Автоматизация процесса поиска существенно снизит затраты, повысит шанс потерявшегося человека на выживание, позволит затронуть трудно проходимые для человека области (болота, лесные завалы). Помимо прочего, автоматическое распознавание аэрофотоснимков наиболее перспективный способ получения информации о расположении объектов на местности. Отказ от ручного анализа аэрофотоснимков актуален, когда требуется произвести анализ большого количества снимков с множества участков земной поверхности за ограниченное время. В настоящее время перспективным способом обработки фотографий является вариант использования нейросетевых технологий. Решение задачи лежит в области машинного обучения применительно к сегментации изображений.
Сегментация определяется нахождением на изображении характерных областей, которые могут быть одинаково описаны в одном едином пространстве признаков. Она, в свою очередь, содержит в себе различные разделы. Один из них – семантическая(смысловая) сегментация изображений. Она заключается в выделении на изображении различных областей, каждая из которых соответствует одному определенному признаку. Для выполнения этой задачи, в рамках решения вопроса машинного обучения, используются сверточные нейронные сети.
В рамках поставленной задачи – поиск человека – предлагается реализация метода бинарной сегментации. Это процесс обработки изображения, при котором на вход нейронной сети подаются цветные изображения, на которых требуется выделить области пикселей, относящихся к одному классу - человек. Впоследствии, производится сортировка обработанных изображений по принципу обнаружил или не обнаружил.
Наиболее подходит для выполнения вышеописанной задачи семейство моделей обнаружения объектов на базе YOLO от Ultralytics – YOLOv8. Нейронная сеть обладает высокой эффективностью и гибкостью, высокой скоростью обработки изображений по сравнению с другими разновидностями, обеспечивает единую структуру для обучения моделей. Для подготовки набора данных для обучения использовался ряд видео-фрагментов снятых на БПЛА. Было произведено их дробление на отдельные кадры. Также, к каждому полученному изображению были созданы дубликаты для которых были применены эффекты поворота и зашумления. В результате из имеющихся 2324 файлов было получено 4648.
Созданная на основе YOLOv8 модель для распознавания человеческих образов на фотоснимках с беспилотных летающих аппаратов показала оптимальные результаты. В процессе обучения нейронной сети была произведена автоматическая генерация аналитических данных. В качестве примера на рисунке 1 приведен график зависимости точность-полнота. При идеальном алгоритме обучения площадь под кривой должна стремиться к 1. В данном случае она равна 0.859 при заданном пороге фильтрации в 0.5, что является приближенным значением к достаточному.
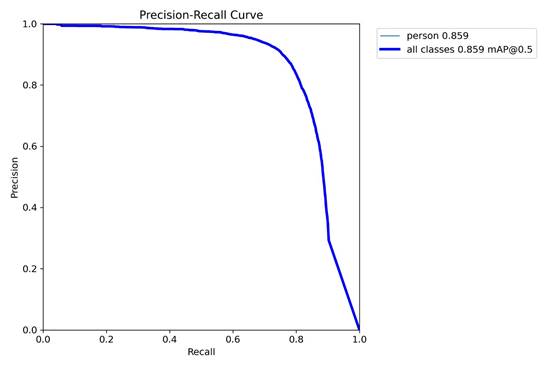
Рисунок 1. Кривая зависимости классификаторов точности и полноты
Далее произведем сравнение полученных результатов распознавания с исходными изображениями. Для их демонстрации следует обратить внимание на рисунок 2.

Рисунок 2. Сравнение результатов распознавания
Можно заметить, что при распознавании нейронной сетью был найден только класс людей, определенный при обучении. Иных объектов выделено не было. Исходя из этого, можно сделать вывод, что степень обучения нейронной сети является достаточной для решения поставленной задачи; переобучение отсутствует.
Список литературы:
1. Глубокое обучение. Погружение в мир нейронных сетей / Е.В. Архангельская. — Санкт-Петербург: Питер СПб, 2018. — 480 с.
2. Госстатистика о количестве людей находящихся в розыске [Электронный ресурс] // FedStat. - 19 октября 2023. - https://fedstat.ru/indicator/36196.
3. Обработка изображений с помощью OpenCV / Г.Г. Буэно. — Москва: ДМК Пресс, 2016. — 210 с.
4. Программирование компьютерного зрения на Python / Я.Э. Солем. — Москва: ДМК Пресс, 2016. — 312 с.
5. Статистика отряда «ЛизаАлерт» за 2022 год [Электронный ресурс] // LizaAlert. - Январь 2023. - https://lizaalert.org/statistika-otryada-lizaalert-za-2022-god/.
