Статья:




СРАВНИТЕЛЬНЫЙ АНАЛИЗ АЛГОРИТМОВ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТЯЖЕЛОГО АНПА
Конференция: CCCXX Студенческая международная научно-практическая конференция «Молодежный научный форум»
Секция: Технические науки
Выходные данные
Ростова А.А. СРАВНИТЕЛЬНЫЙ АНАЛИЗ АЛГОРИТМОВ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТЯЖЕЛОГО АНПА // Молодежный научный форум: электр. сб. ст. по мат. CCCXX междунар. студ. науч.-практ. конф. № 41(320). URL: https://nauchforum.ru/archive/MNF_interdisciplinarity/41(320).pdf (дата обращения: 25.07.2026)
Лауреаты определены. Конференция завершена
Эта статья набрала 0 голосов
Мне нравится0
Дипломы
лауреатов
лауреатов
Сертификаты
участников
участников
Дипломы
лауреатов
лауреатов
Сертификаты
участников
участников

CCCXX Студенческая международная научно-практическая конференция «Молодежный научный форум»
СРАВНИТЕЛЬНЫЙ АНАЛИЗ АЛГОРИТМОВ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТЯЖЕЛОГО АНПА
Ростова Анастасия Александровна
магистрант, Санкт-Петербургский государственный морской технический университет, РФ, г. Санкт-Петербург
Мурза Полина Андреевна
научный руководитель, ст. преп. каф. САУ и БВТ, Санкт-Петербургский государственный морской технический университет, РФ, г. Санкт-Петербург
COMPARATIVE ANALYSIS OF MOTION CONTROL ALGORITHMS FOR A HEAVY AUV
Rostova Anastasia Aleksandrovna
Master's Student, Saint Petersburg State Marine Technical University, Russia, Saint Petersburg
Murza Polina Andreevna
Scientific supervisor, Senior Lecturer, Department of Automatic Control Systems and Computer Engineering, Saint Petersburg State Marine Technical University, Russia, Saint Petersburg
Аннотация. Актуальность управления автономными необитаемыми подводными аппаратами (АНПА) связана с расширением их применения в морских исследованиях и оборонной сфере. В статье представлен сравнительный анализ "глобальных" алгоритмов управления движением тяжелого АНПА, инвариантных к углу крена. Исследованы алгоритмы на основе круговых функций, направляющих косинусов и параметров Родрига-Гамильтона. Разработана математическая модель пространственного движения, проведено имитационное моделирование в MATLAB Simulink. Результаты подтвердили устойчивость всех алгоритмов во всем диапазоне ориентации. Наибольшую перспективу показал алгоритм на основе параметров Родрига-Гамильтона, которые непосредственно вычисляются в контуре навигационной системы.
Abstract. The relevance of Autonomous Underwater Vehicle (AUV) control is driven by their expanding applications in marine research and defense. The paper presents a comparative analysis of "global" motion control algorithms for a heavy AUV, invariant to roll angle. Algorithms based on circular functions, direction cosines and Rodrigues-Hamilton parameters are investigated. A mathematical model of spatial motion was developed with simulation in MATLAB Simulink. Results confirmed stability of all algorithms across the orientation range. The algorithm based on Rodrigues-Hamilton parameters showed greatest promise due to their direct computation in the navigation system loop.
Ключевые слова: АНПА, система управления, алгоритмы управления, круговые функции, направляющие косинусы, параметры Родрига-Гамильтона, имитационное моделирование.
Keywords: AUV, control system, control algorithms, circular functions, direction cosines, Rodrigues–Hamilton parameters, simulation modeling.
Тяжелые автономные необитаемые подводные аппараты являются ключевым инструментом для решения задач в области подводной разведки, мониторинга подводной инфраструктуры и научных исследований. Эффективность выполнения этих задач в значительной степени определяется точностью и надежностью системы управления движением аппарата.
Традиционные системы управления, основанные на использовании углов Эйлера (курс ψ, дифферент θ, крен γ), хорошо зарекомендовали себя в условиях малых отклонений. Основным недостатком данных алгоритмов является ограничение по углу крена ±80°. При работе за этим пределом перекладка рулей становится неэффективной вследствие кинематической связи между каналами управления, что существенно ограничивает маневренные возможности АНПА.
Для преодоления данного недостатка в практике проектирования применяются алгоритмы, условно называемые «глобальными». В статье проводится сравнительный анализ трех перспективных «глобальных» алгоритмов управления, обеспечивающих работоспособность системы управления при любых углах крена, вплоть до ±180°. К ним относятся алгоритмы, сформулированные в круговых функциях, направляющих косинусах и параметрах Родрига-Гамильтона.
Целью данной статьи является сравнительный анализ эффективности «глобальных» алгоритмов управления для тяжелого АНПА на основе имитационного моделирования.
В качестве объекта исследования рассматривался тяжелый АНПА торпедообразной формы, аналогичный аппарату «Hugin» (Рисунок 1).

Рисунок 1. Внешний вид рассматриваемого аппарата
Для проведения исследований была разработана нелинейная математическая модель пространственного движения, включающая:
- Динамику аппарата как твердого тела в связанной системе координат.
- Гидродинамические силы и моменты, описываемые нелинейными зависимостями от углов атаки α, дрейфа β и угловых скоростей.
- Силы и моменты, создаваемые движительно-рулевым комплексом.
Модель реализована в виде S-функции на языке C и интегрирована в среду имитационного моделирования MATLAB Simulink (Рисунок 2).
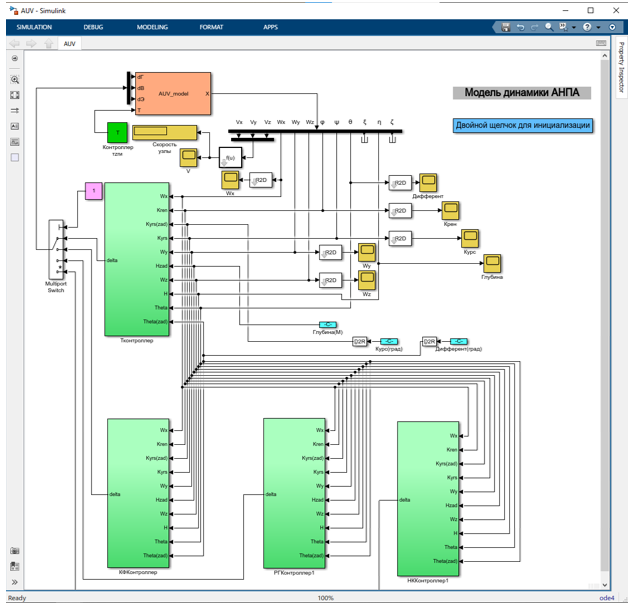
Рисунок 2. Модель динамики подводного объекта, реализованная в виде структурной схемы
Математическая модель, представленная в работе, описывается системой дифференциальных уравнений первого порядка, включающей шесть динамических и шесть кинематических уравнений. Динамика аппарата как твердого тела в связанной системе координат описывается векторным уравнением

где q — вектор обобщенных скоростей, D — матрица инерции, F — вектор внешних сил и моментов, B — блочная матрица обобщенных скоростей. Кинематические уравнения Эйлера-Крылова связывают проекции угловой скорости с производными углов ориентации, а уравнения связи определяют скорость изменения координат полюса аппарата в стартовой системе отсчета.
Сравнивались следующие алгоритмы управления, формирующие сигналы на перекладку рулевых органов: элеронов (δЭ), вертикальных (δB) и горизонтальных (δГ) рулей.
1. В круговых функциях: учитывает кинематическую связь каналов курса и глубины через углы крена и дифферента.
![]()
![]()
![]()
![]()
![]()
Где U₁, U₂, U₃ — управляющие сигналы, по каналу крена, курса и глубины соответственно; k – коэффициенты усиления в соответствующих каналах управления; ωx, ωy, ωz — проекции угловой скорости на связанные оси аппарата; η – глубина.
2. В направляющих косинусах: в качестве управляющих сигналов используются элементы матрицы направляющих косинусов.
![]()
![]()
![]()
![]()
![]()
Элементы матрицы направляющих косинусов:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
3. В параметрах Родрига-Гамильтона: Управление строится на основе компонент кватерниона, вычисляемых бортовой навигационной системой.
![]()
![]()
![]()
Где qi – ПРГ, описывающие ориентацию аппарата в пространстве.
Сравнительный анализ алгоритмов проводился путем оценки качества переходных процессов. Критериями служили время выхода на заданное значение и величина перерегулирования. Для обеспечения наилучших показателей для каждого алгоритма проводился аналитический подбор коэффициентов управления, в результате которого были найдены такие значения k, которые обеспечивают максимально быстрое и точное слежение за заданием при сохранении устойчивости.
Для всех алгоритмов было проведено имитационное моделирование движения тяжелого АНПА (Рисунки 3 – 5).
Анализ результатов моделирования показал, что все исследованные глобальные алгоритмы обеспечивают устойчивую работу, однако имеют различные характеристики:
1. Алгоритм в круговых функциях демонстрирует устойчивость во всем диапазоне углов крена и обеспечивает высокое качество переходных процессов за счёт явного учёта кинематической связи каналов курса и глубины через углы крена и дифферента.
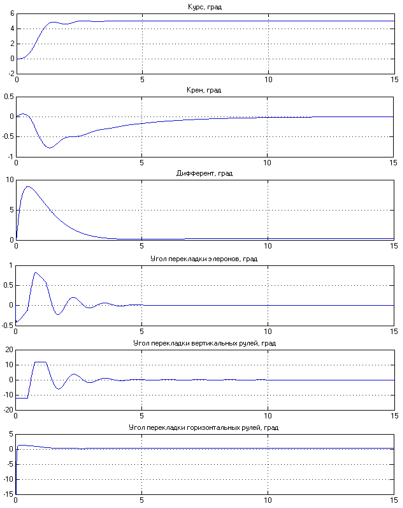
Рисунок 3. Результаты моделирования движения подводного аппарата в круговых функциях
2. Алгоритм в направляющих косинусах также сохраняет абсолютную устойчивость, используя в качестве управляющих сигналов элементы матрицы ориентации, что делает его инвариантным к величине угла крена.
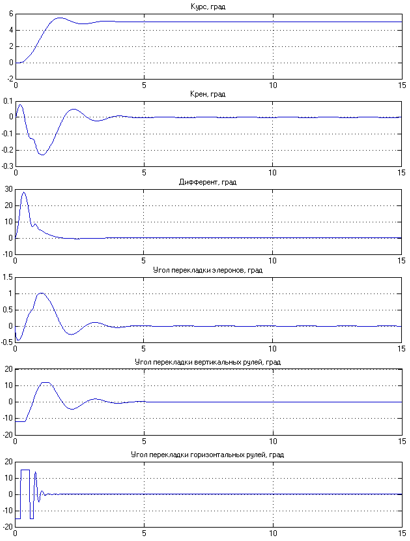
Рисунок 4. Результаты моделирования движения подводного аппарата в направляющих косинусах
3.Алгоритм на основе параметров Родрига-Гамильтона показал наилучшее быстродействие, а также обладает ключевым преимуществом вычислительной эффективности, поскольку параметры Родрига-Гамильтона непосредственно вычисляются в контуре навигационной БИНС, что упрощает формирование управляющих сигналов в БЦВМ.
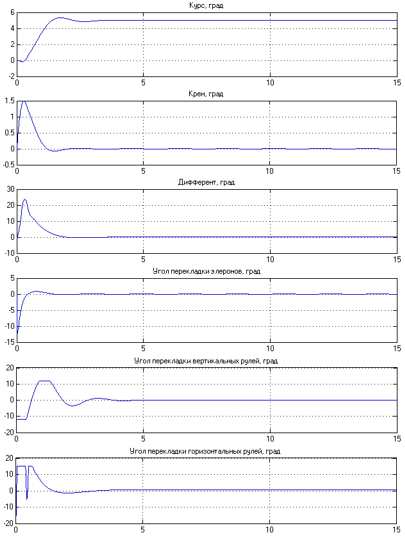
Рисунок 5. Результаты моделирования движения подводного аппарата в параметрах Родрига-Гамильтона
Проведенное исследование позволило выявить сравнительные преимущества каждого из «глобальных» алгоритмов. Наиболее перспективным для практической реализации признан алгоритм на основе параметров Родрига-Гамильтона, который сочетает в себе высокое быстродействие и минимальную вычислительную нагрузку.
Перспективой дальнейших исследований является адаптация коэффициентов данных алгоритмов для работы в условиях неопределенности гидродинамических характеристик аппарата и внешних возмущений.
Список литературы:
1. HUGIN Autonomous Underwater Vehicle (AUV) [Электронный ресурс]. – Kongsberg Discovery. – URL: https://www.kongsberg.com/discovery/autonomous-and-uncrewed-solutions/auv/hugin
2. Агеев, М.Д., Автономные подводные роботы: системы и технологии / М.Д. Агеев, Л.В. Киселев, Ю.В. Матвиенко – Владивосток : ИПМТ ДВО РАН, 2005. – 398с.
3. Бочаров, Л. Необитаемые подводные аппараты, состояние и общие тенденции развития: Электроника. Наука, технология, бизнес / Л. Бочаров – Москва : Техносфера, 2009. – №7. – 93с.
4. Гостилович, С.О. Разработка и исследование системы управления движением подводного аппарата в вертикальной плоскости. Математическая модель подводного аппарата: Политехнический молодежный журнал / С.О. Гостилович – Москва : МГТУ, 2018. – №2. – 11с.
5. Дяченко, А.Н. Элементы системы управления автономными необитаемыми подводными аппаратами и методы их разработки: Техника средств связи / А.Н. Дяченко – СПб.: Интелтех, 2018. – 88с.
6. Инзарцев, А.В. Подводные робототехнические комплексы: системы, технологии, применение / А.В. Инзарцев, Л.В. Киселев, В.В. Костенко – Владивосток: Дальнаука, 2018. 368с.
7. Шереметов, Б.Б. Основы динамики и навигации подводных средств движения: Учебное пособие / Б.Б. Шереметов – СПб.: СПбГМТУ, 1996. – 64с.
