МОДЕЛЬ НАКОПЛЕНИЯ СТАТИЧЕСКОГО ФОНА С УЧЕТОМ НЕСТАБИЛЬНОСТИ СЦЕНЫ
Журнал: Научный журнал «Студенческий форум» выпуск №17(240)
Рубрика: Технические науки

Научный журнал «Студенческий форум» выпуск №17(240)
МОДЕЛЬ НАКОПЛЕНИЯ СТАТИЧЕСКОГО ФОНА С УЧЕТОМ НЕСТАБИЛЬНОСТИ СЦЕНЫ
Модель фона
Модель фона (накопление фона) – это метод отделения элементов переднего плана от фона, который выполняется путем создания маски переднего плана. Данный метод используется для обнаружения динамически движущихся объектов со статических камер и активно используется в решении задач, связанных с охраной периметра [1].
В данной статье мы, основываясь на существующих подходах, таких как «Real-time detection of abandoned bags using CNN» [1] и «Robust Abandoned Object Detection Using Dual Foregrounds» [2], реализуем собственную модель фона, устойчивую к шумовым движениям и резким изменениям сцены. А в конце проведем сравнительный анализ полученной модели с моделями, чей подход был взят за основу, а также моделью, основанной на нейронных сетях.
Существующие подходы
Для построения модели фона нередко используется концепция скользящего среднего, в которой видеопоследовательность анализируется по определенному набору кадров. В течение этой последовательности кадров вычисляется скользящее среднее по текущему и предыдущим кадрам, в итоге получая фоновую модель, где любой новый объект, появившийся в текущей последовательности кадров, становится частью переднего плана.
Таким образом, каждый новый кадр содержит новый объект с фоном, на котором вычисляется абсолютная разница между фоновой моделью (которая является функцией времени) и самим кадром (1):
|
|
(1) |
Так, dst – накопительное изображение с тем же количеством каналов, что и входное изображение; x, y – координаты изображения; src – новый кадр, α – вес входного изображения, который регулирует скорость обновления фона (насколько быстро накопитель фона «забывает» о более ранних изображениях) [1].
Для того, чтобы отделить временно статичные пиксели от фона сцены, одного фонового изображения не достаточно, поэтому используется модель с двумя фонами для получения как долговременного фона, так и кратковременного фонов (рис. 1). Также, исходя из сцены, для каждого накопительного изображения эмпирическим путем подбираются α: в данном случае 0.02 и 0.1 для долговременного и кратковременного, соответственно.
По кратковременному фону строится маска движения – бинаризованное по порогу накопительное изображение (рис. 2).
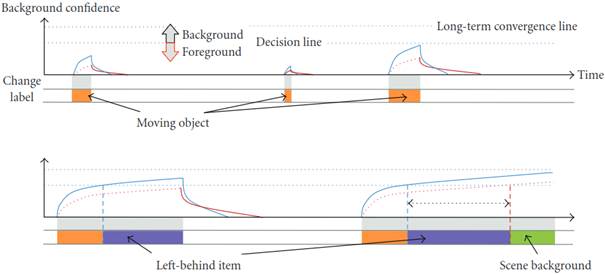
Рисунок 1. Достоверность моделей долгосрочного и краткосрочного фонов

Рисунок 2. Построение маски движения и ее бинаризация
Вместе с маской движения находится долговременный фон с последующей бинаризацией (рис. 3).

Рисунок 3. Построение долговременного фона и его бинаризация
Затем полученная маска движения вычитается из долговременного фона, в итоге получая устойчивый статический фон (рис. 4) [2].

Рисунок 4. Устойчивый статический фон, полученный в результате накопления двух фонов
Альтернативное решение
Исходя из рис. 4, есть основания полагать, что данная модель не достаточно помехоустойчива. В связи с этим, попробуем реализовать собственную модель, а затем проведем сравнительный анализ, для оценки используя MSE (Mean Squared Error – среднеквадратичная ошибка) и среднее время обработки кадра.
Чтобы сделать систему более помехоустойчивой, в отличие от моделей с двумя фонами, используем три фона, где первые два будут служить для построения долговременного фона, а третий – кратковременного. Такой подход обеспечит дополнительную фильтрацию шумового движения и резких изменениий сцены.
Как и в предыдущем методе, по кратковременному фону строится маска движения с α, равным 0.1, и долговременный фон с α, равным 0.02. Вместе с этим строится еще один долговременный фон с α, равным 0.016 (рис. 5). Тогда разница первых двух накопительных изображений, с учетом исключения из накопления пикселей, содержащихся в маске движения, будет являться устойчивым статическим фоном (рис. 6).

Рисунок 5. Построение второго долговременного фона и его бинаризация
Рисунок 6. Устойчивый статический фон, полученный в результате накопления трех фонов
Теперь перейдем к сравнению. Оно проводилось на CPU на тестовом видео с разрешением 480×640 и средним FPS – 30 к/с. Используемая операционная система: Manjaro Linux, GNOME 43.1. CPU: Intel® Core™ i5-8300H × 8:
Таблица 1.
Сравнение моделей с двумя и тремя фонами
|
Модель фона |
Среднее MSE |
Среднее время обработки кадра, с |
|
С 2 накопительными изображениями |
8.2e-3 |
47e-4 |
|
С 3 накопительными изображениями |
1.6e-5 |
54e-4 |
Как видно из табл.1, среднее время обработки кадра имеет один порядок, чего нельзя сказать об MSE – тут данные разнятся на два порядка. А значит, модель с двумя фонами уступает модели с тремя в точности, при этом почти не уступая в скорости обработки кадров.
Также стоит сказать и про модели, принцип работы которых основан на нейронных сетях. Так, модель «A hybrid framework combining background subtraction and deep neural networks for rapid person detection» [3], используя U-Net [4] для сегментации, классифицирует объекты в кадре и отделяет фон от переднего плана.
Однако, решения такого рода имеют существенный недостаток – тяжеловесность. Продемонстрируем это, проведя сравнительный анализ полученной нами модели и модели, озвученной выше, с теми же входными параметрами, что и при сравнении моделей с разным количеством фонов:
Таблица 2.
Сравнение моделей с использованием нейронной сети и без
|
Модель фона |
Среднее MSE |
Среднее время обработки кадра, с |
|
С использованием нейронной сети |
1.4e-5 |
32e-2 |
|
Без использования нейронной сети |
1.6e-5 |
54e-4 |
Как видно из табл.2, теперь мы имеем обратную ситуацию: среднее MSE имеет один порядок, а среднее время обработки кадра разнится на два порядка. А значит, модель, использующая нейронную сети, хоть и немного опережает в точности, сильно уступает в скорости обработки кадров.
Выводы
Таким образом, была получена модель с лучшей помехоустойчивостью к шумовому движению и незначительным нестабильностям сцены, не уступающая по быстродействию более легковесным моделям, и более тяжеловесным по точности.
Возможные улучшения: блочный адаптивный подбор параметров α.
